����Ŀ¼
1.Adaptive AUTOSAR��Classic AutoSAR�ص�
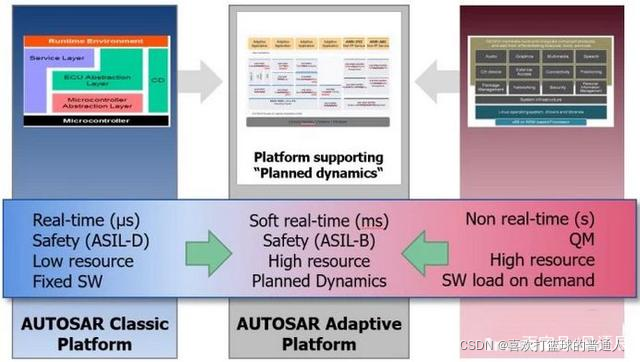
Classic AutoSAR�ǻ���ǿʵʱ�Ե�Ƕ��ʽOS�Ͽ��������������ܹ�,�����㴫ͳ�������ƻ��Ĺ�������,���ܺܺ�ʤ��;
����һ��Ҫ������������,����ܿ������ӳ١�����,�ܿ���������ǿʵʱ��,���������Classic AutoSAR������Ϊ����,Adaptive AUTOSAR�͵����ˡ�
����Adaptive AUTOSAR��ȫ���������ͣ����ASIL-B(�����D),���Ժܶ���Ҫǿ��ȫ�����ECU���»�����ҪClassic AutoSAR(������ASIL-D)��ʵ�֡�
- �ԱȽ������:

AP��CP AutoSar��ϵ����: - Adaptive Autosar �������Classic Autosar�������滻,���ij�����Ҫ������������ӵ�����,�����Զ���ʻ���������Լ�����Ƶ�
- ����ͳ��ECU��Ȼ����Classic Autosar���п���,ͬʱ���ǹ�����δ������������,���ǿ���ͨ����̫�����н�����
2.Adaptive AUTOSAR��Classic AutoSAR�Ա�
����Autosar����ƽ̨����������������,���������ص�:
- (1)Ӳʵʱ,����usʱ��������¼���ʵʱ����,Ӳʵʱ����������������������,�Ա�֤ϵͳ�Ŀɿ����С�
- (2)�߹��ܰ�ȫ�ȼ�,��ɴﵽASIL-D�İ�ȫ�ȼ���
- (3)��CPU��RAM��Flash����Դ���нϵ͵�ռ���ʡ�
- (4)��������ͨ���ǹ̻����ɶ�̬����ġ�
Apdative Autosar��Ϊ�칹����ƽ̨�������ܹ�,Adaptive AUTOSAR��Ҫ�����������,���Գ�Ϊ����Classic AutoSAR��Linux�����ķ�ʵʱOS������,����������ص�:
-
1����ʵʱ,���к��뼶�ڵ��������,��ż�������������Ҳ������������Ժ����
-
2������һ���Ĺ��ܰ�ȫҪ��,�ɴﵽASIL-B����ߡ�
-
3���뾭��ƽ̨��ͬ����,���������ڶ�˶�̬����ϵͳ�ĸ���Դ����,��QNX��
-
Adaptive Autosar��Classic Autosar���,��ʵʱ��Ҫ����������,���ڱ�֤һ�����ܰ�ȫ�ȼ��Ļ�����,�������˶Ը����ܴ���������֧��,��֧�����ܻ���Ӧ�ù��ܵĿ���,���C++����ΪAdaptive Autosarƽ̨����Ҫ�������ԡ�
-
AUTOSAR Adaptive��һ����Ҫ������ͨ�Ų�ara::com,������AUTOSAR AdaptiveӦ��֮���ͨ��,Ҳ����������������ECU֮���ͨ�š�
-
AUTOSAR Adaptive��Ϊ��ϡ���Ϣ��ȫ���ܰ�ȫ�ṩ����֧�֡�
-
����AUTOSAR Classic���������dz�����,������һЩ�ܹ��ͼ����ϵ�����,����ara::com��һ�����������м��,��ʹ���������ڼ䶯̬����ͨ��·����Ϊ����,���ֶ�̬����ECU�����ڼ䰲װ������ǰ�ᡣ
Ȼ����AUTOSAR Classic��,��Ҫ������ͨ�ž���,Ȼ�������ECU���ջ����µ����ݡ�
ʹ���������ķ���,���Զ�̬��������Ķ���,�Ӷ�ʵ��Ӳ���������ϲ��������ϸ�ķ���,ʹ�������ж�����Ӳ����Ӧ�ñ�ø߶ȿ���ֲ�� -
�����AUTOSAR Classic��ECU���,���ַ�ʽ�����Ż�����Դ���á�
����,�ڿ�����,���ij��ECU����Դ�ﵽ����,�����ڲ�����Ӳ��������°��������ɵ���ֲ����һ����������ECU��,��������ڲ�ͬ�����ϵ������Դ�������� -
��AUTOSAR Adaptive��Ŀ��,��Ӳ������ʹ��OEM��Ӧ��֮���������������µı仯��
��ǰһ�����ܿ�ͨ������Ϊ�����е�һ�������豸������,������ȫ��������ֻ�ɹ�������
Ϊ��ʵ�����ַ�ʽ,ÿ��AUTOSAR AdaptiveӦ�ö���һ�������Ķ������ļ�,Ӧ�ÿ�����������ECU������
ͨ����װӦ���̵��Ӧ��,����˾���Լ�Ҳ���Գ�Ϊһ�����������ߡ� -
���������е�ϵͳ�����˹���,˭��Ϊ�˸�����?δ�����Ե�Ӧ����Ͽ��Ա���װ�ڳ�����,�������κʹ�ͳ��ECU����Ҫ�����ͻ,AUTOSAR Classic��ÿһ�����ö���Ҫ�������IJ��ԡ�
-
Ϊ�˱������AUTOSAR Adaptive������Ӧ�õ����,���뱣֤Ӧ��֮�����š�
����ϵͳ���Ա�֤��ȫ��ص�Ӧ�ò��ᳬ���ڴ����ޡ�
Ϊ�˴ﵽ���Ŀ��,����ϵͳ�ṩӲʵʱ���ȷ���,ΪӦ�ö����ڴ�����������ִ��ʱ�䡣��Ϊû����Ӳ����ֱ�ӽ���,�жϵ��µĸ��ر仯��ò�����Ҫ�� -
Adaptive Autosar�ij��ֲ�����Ϊ��ȡ��Classic Autosarƽ̨,������Բ�ͬ��Ӧ�ó���ʵ�����ߵĹ����Э��,Classic Autosarƽ̨֧�ָ߰�ȫ�Ժ�ʵʱ�Ե�Ӧ�ó���,��˶������Ƕ��ʽ�����������貿�������ھ���ƽ̨��;
-
��Adaptive Autosar��֧�ִ����ݵIJ��д���,���Զ��ڸ���������Ĺ�������Ҫ������Adaptiveƽ̨��
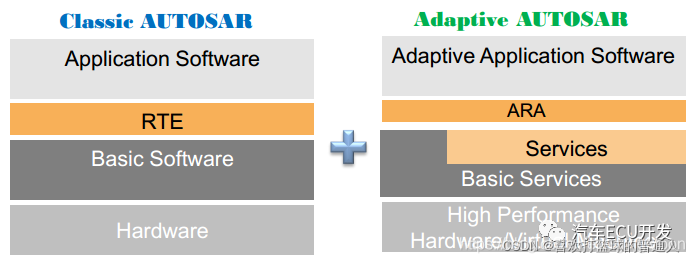
Simulink��CP��AP�ĶԱ�
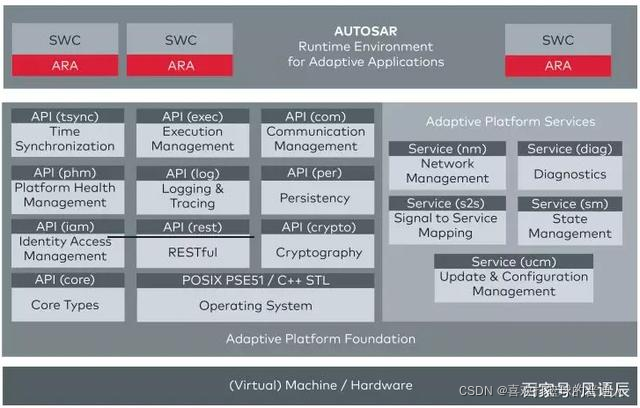
- �������е�RTE��Classic Autosar��,��ARA(Autosar Run-time For Adaptive)��Adaptive Autosar��ʵʱ���л���
- ������Ҫ������ Classic RTE�����Ǿ�̬���õ�,��Adaptive ARA���Ƕ�̬��,����Application���������ڵ����ϰ�װ����һ������װ��������ж�ء�
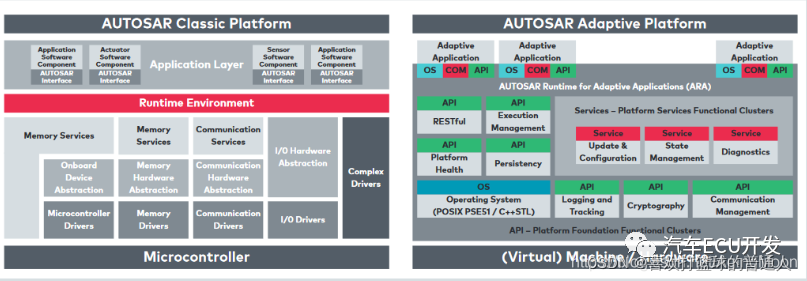
Vector��AP��CP�ĶԱ� - Adaptive Autosar�б����˲���Classic�Ļ�������,������ϡ����������,�������˺ܶ��µķ��������������á�����������ִ�й�����״̬ת�Ƶȡ�
- ����ϵͳ��֮ǰ��Autosar OS ��ΪPOSIX(����ֲ����ϵͳ)��Linux�ȡ�

3.AP�ܹ�˵��
-
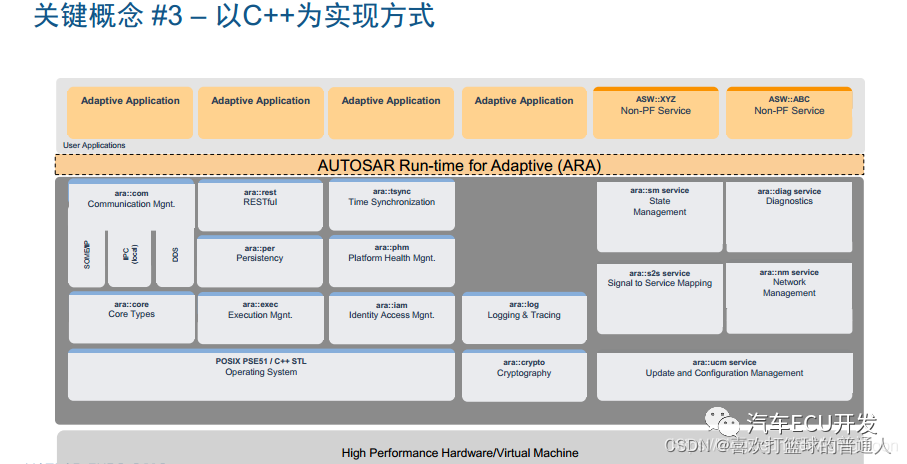
�ܹ��ֲ���Ҫ��ΪӲ����,���������,ARA(ʵʱ���л���),�Լ�Ӧ�ò㡣

-
�����������,��Ҫ�������,ͨ�ŷ���(COM)�����ܷ���(crypto)����־��¼����(Log)����Ϸ���(Diag)���洢����(Per)��״̬����(SM)��ִ�й���(Exec)��ʱ��ͬ��(Tsync)���������ù���(UCM)��

4.AP�ؼ���
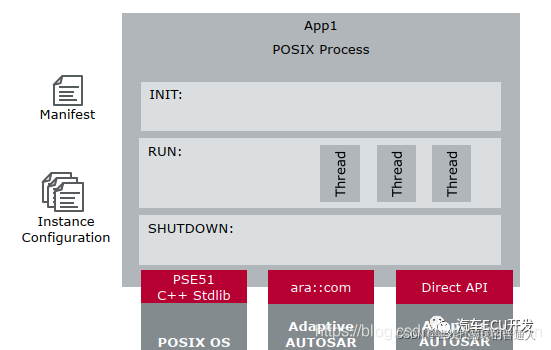
�ؼ�����1:һ�ж���OS�еĽ���
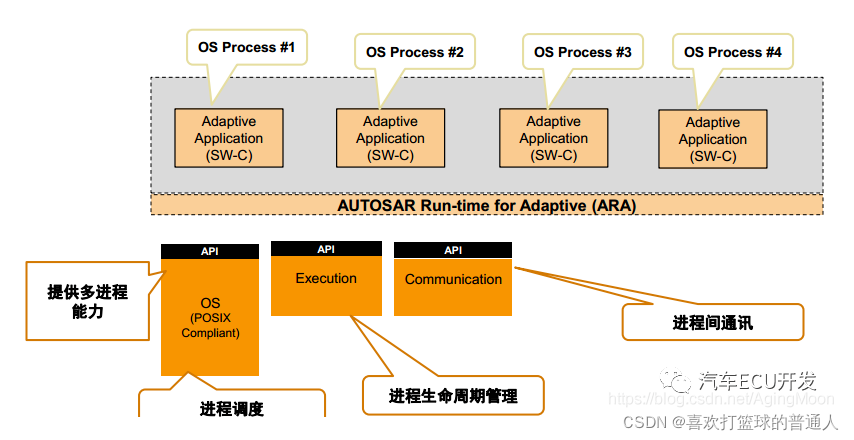
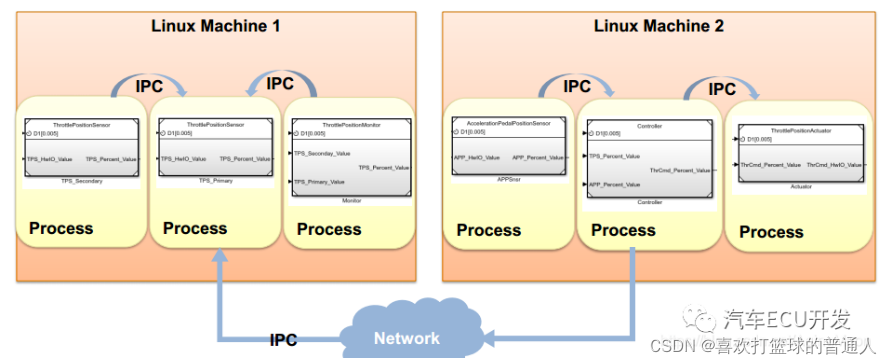
�ؼ�����2:�������Ľ��̼�ͨѶ
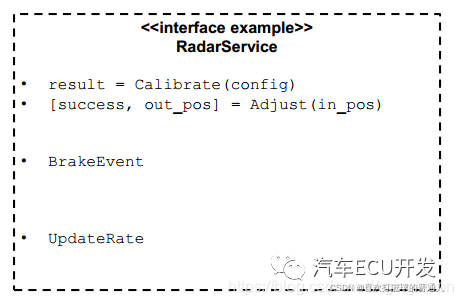
����ӿڿ�����:
- ����(����)
- ʱ��(��Ϣ)
- �ֶ�(����)
�ؼ�����3:��C++Ϊ��ʽʵ��
5.AP�����������
���̹���
- Application����OS��һ��һ������
- Autosar ����һ��Manifest�������ù�����Щ������Ϣ,����ƽ̨��ص���Ϣ,�ָ������Լ����������ص�������ϵ,Instance�����ļ���Ҫ������̬����Ϣ,��������ִ�й���Exec�����������ù���UCM�Լ�״̬����SM������Ϲ������̡�
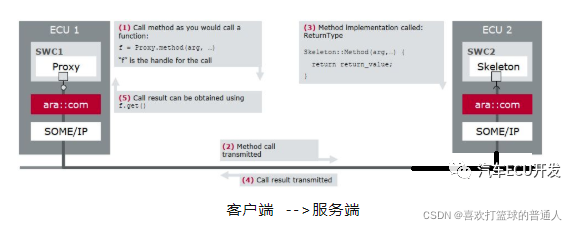
ͨ�ŷ���ara::com
- ����Proxy/Skeleton��ͨ�żܹ�,ͬʱ�����м��SOME/IP��
�����������ʽ����ͼ(vectorͼ)��ʾ:1. �����������C2.������C3.���÷���C4.�����Ӧ�C5.��ȡ�����
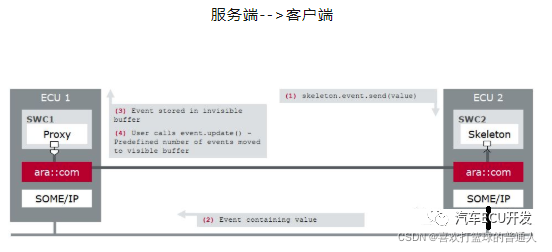
�����¼������������:1.������¼�����C2.�¼�����C3.�¼��洢�C4.�û��¼�������
ִ�й��� ara::em
- ִ�й�������ϵͳ��ʼ���Լ�Adaptive Applications�������رա�
- ��ʹ��Manifest�ļ��а�������Ϣ��ִ����Щ����,������ʱ�Լ����������ִ���ļ���
������:����OS������,����Ӧ�õ�manifest�ļ��е�����,����Ӧ�ó����������ִ�С�
���н�:ʹӦ��������״̬����������״̬,�����״̬��״̬�ĸı�ͽ��̵���ֹ��
�رս�:�ڲ���ϵͳ�н���Ӧ��ʵ���Ľ��̡�
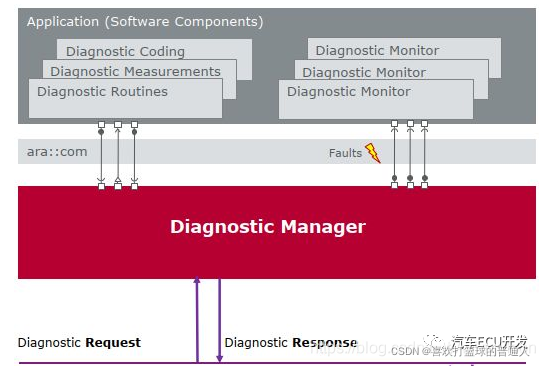
��Ϲ���ara:diag
- Adaptive AutosarҲͬ��ʹ��UDS��Ϸ���,ֻ�������������̫����ʽ,ͬʱҲ���Կ���Ӧ�ò�ͨ��com������������Ϸ���
�洢����ara::per
-
��Ҫͨ��perģ��ķ�������Թؼ����ݽ��д洢��ʵ�����洢��

-
�ο�:Adaptive AUTOSAR��������������,Adaptive Autosar ����ܹ����

