ʵ����������ӳ���֪ʶ,���Ա���ֻ��������ֲ�ֱ������ϵתΪ��������ϵ
��������ϵ��,P��Ϊ��λ����һ��,����P��Ҫ2������ ( ? , �� ) (\phi,\theta) (?,��)
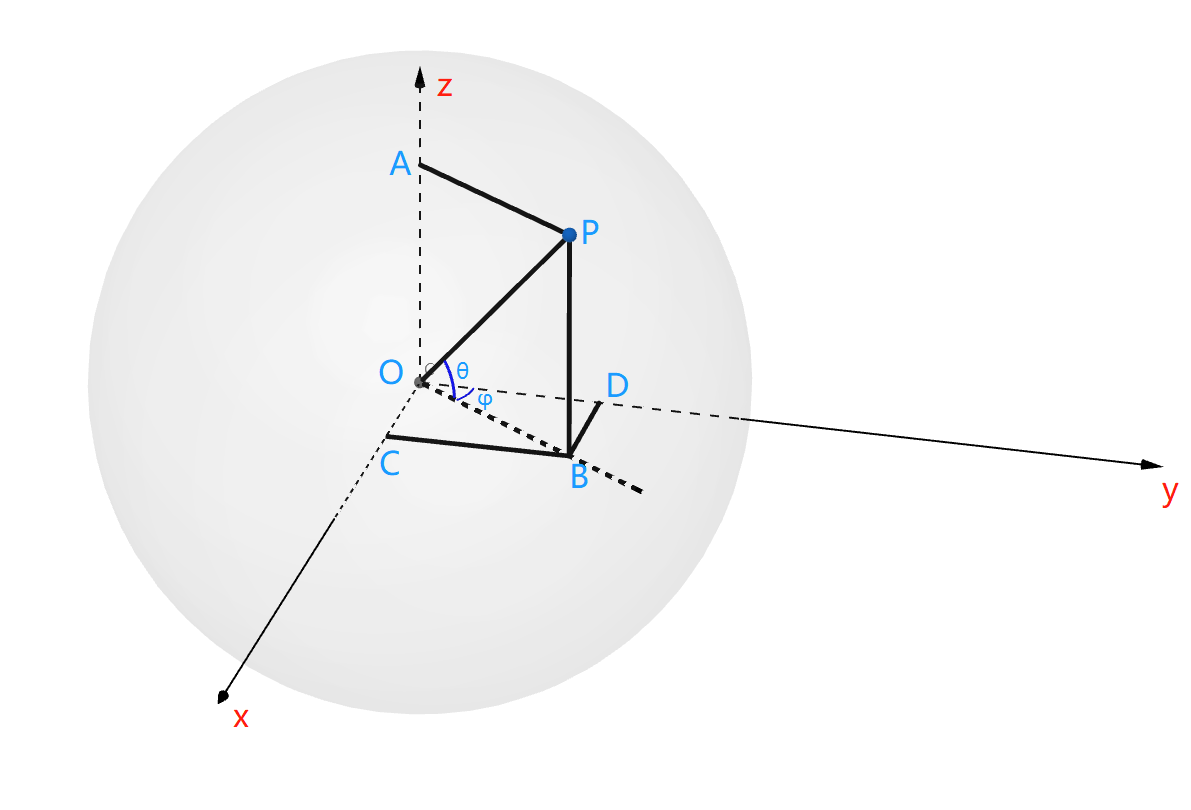
\qquad ������Ƕ���: �� �� �Ϧ� ���� Ϊ x O z xOz xOzƽ����OP���߶�OB֮��ļн�, �� ? ��\phi ��? Ϊ�߶�OP�� x O z xOz xOzƽ���ͶӰ��y������ļн�,����нDz�ͬ�ط�����IJ�̫һ��,�����Ƶ���ʽû�κ����������ֶ��巽ʽ�������ǵ�ȡֵ��Χ��:
? �� ( 0 , 2 �� ) �� �� ( ? �� / 2 , �� / 2 ) \phi��(0,2��)\qquad�ȡ�(-\pi/2,\pi/2) ?��(0,2��)����(?��/2,��/2)
�������Ǻ�����ʽ�ܼ����Ƴ�ֱ������ϵ����������ϵ�Ĺ�ϵ(ע:�뾶 r = 1)
x
=
�O
B
D
�O
=
O
B
?
s
i
n
?
,
O
B
=
1
?
c
o
s
��
,
��
x
=
s
i
n
?
?
c
o
s
��
x = |BD|=OB��sin\phi, OB=1��cos�� ,��x=sin\phi��cos��
x=�OBD�O=OB?sin?,OB=1?cos��,��x=sin??cos��
y
=
�O
O
D
�O
=
O
B
?
c
o
s
?
,
O
B
=
1
?
c
o
s
��
,
��
y
=
c
o
s
��
?
c
o
s
��
y = |OD|=OB��cos\phi ,OB = 1��cos��,��y=cos�ա� cos��
y=�OOD�O=OB?cos?,OB=1?cos��,��y=cos��?cos��
z
=
s
i
n
��
z = sin��
z=sin��
��:
x
=
s
i
n
?
?
c
o
s
��
y
=
c
o
s
?
?
c
o
s
��
z
=
s
i
n
��
\large\color{red} x=sin\phi��cos��\\ y=cos\phi�� cos��\\ z = sin��
x=sin??cos��y=cos??cos��z=sin��
��ֱ������ϵת����������ϵ��Ϊ������̵���
- �� x = s i n ? ? c o s �� , y = c o s ? ? c o s �� x=sin\phi��cos��,y=cos\phi�� cos�� x=sin??cos��,y=cos??cos��,��֪ x y = t a n ( ? ) \displaystyle\frac{x}{y}=tan(\phi) yx?=tan(?)
- ? = a r c t a n ( x y ) \displaystyle\color{red}\phi = arctan(\frac{x}{y}) ?=arctan(yx?)
- �� = a r c s i n ( z ) \color{red}\theta=arcsin(z) ��=arcsin(z)
���Ҫ����������ӳ��һ��ͼ��
(1)����ռ�ӳ�䵽�����ռ�
- ��������ϵĿǰ�ķ�Χ�� ? �� ( 0 , 2 �� ) , �� �� ( ? �� / 2 , �� / 2 ) \phi��(0,2��),�ȡ�(-\pi/2,\pi/2) ?��(0,2��),����(?��/2,��/2),
- ��������ij����
(
?
,
��
)
(\phi,��)
(?,��)ת���������ռ��uv����Ϊ
u = ? / 2 �� v = ( �� + �� 2 ) �� \displaystyle \color{red}\mathbf {\large u =\phi/2\pi} \qquad \large\mathbf{v = \frac{(��+\frac{\pi}{2})}{\pi}} u=?/2��v=��(��+2��?)?
(2)�����ռ�ӳ�䵽ͼ��ռ�
- ��һ���ж��ڴ�����ռ�ӳ�䵽�����ռ��һ���� ( u , v ) (u,v) (u,v)
- �����Ӧ��ӳ�䵽ͼ��ռ��ij������
(
i
,
j
)
(i,j)
(i,j)��
i = u ? ( w i d t h ? 1 ) j = v ? ( h e i g h t ? 1 ) \large\color{red} \mathbf{i = u * (width - 1)}\\ \mathbf{j=v * (height - 1)} i=u?(width?1)j=v?(height?1)

