һ,apritag_ros��װ
�ʼ���ÿ�¡Դ�����ķ�ʽ���а�װ,������Jetson nano����opencv4��opencv3����������,��������ֱ�Ӳ��ö����ư�װ:
sudo apt-get install ros-melodic-apriltag-ros
��,��Ŀ������ݶ�ȡ
����ʹ�õ���uvc_camera��:
launch�ļ�:
����ʹ���������ռ�head_camera
head_cameraΪ����궨�������λ��
<launch>
<group ns="head_camera">
<node pkg="uvc_camera" type="uvc_camera_node" name="head_camera" output="screen">
<param name="width" type="int" value="640" />
<param name="height" type="int" value="480" />
<param name="fps" type="int" value="30" />
<param name="frame_id" type="string" value="head_camera" />
<param name="auto_focus" type="bool" value="False" />
<param name="focus_absolute" type="int" value="0" />
<param name="device" type="string" value="/dev/video1" />
<param name="camera_info_url" type="string" value="file://$(find cyrobot)/param/camera/head_camera.yaml" />
</node>
</group>
</launch>
��,��Ŀ����궨
��װ�궨��:
sudo apt-get install ros-melodic-camera-calibration
�궨����:
rosrun camera_calibration cameracalibrator.py --size 7x5 --square 0.0245 image:=/image_raw camera:=/camera --no-service-check
(1)�Csize 7x5 Ϊ�����ڲ��ǵ�ĸ���,�����м���(��Ҫ��1),�����ҵı궨�巽����8X6,��siezΪ7x5��
(2)�Csquare 0.0245Ϊÿ�����̸�ı߳�
(3)image:=/image_raw Ϊ��ǰ���ĵ�ͼ��������Ϊ/image_raw��topic
(4)camera:=/head_cameraΪ������� ��Ҫ����COMMITʱ�Զ������ڲβ���
- �ƶ��궨��:
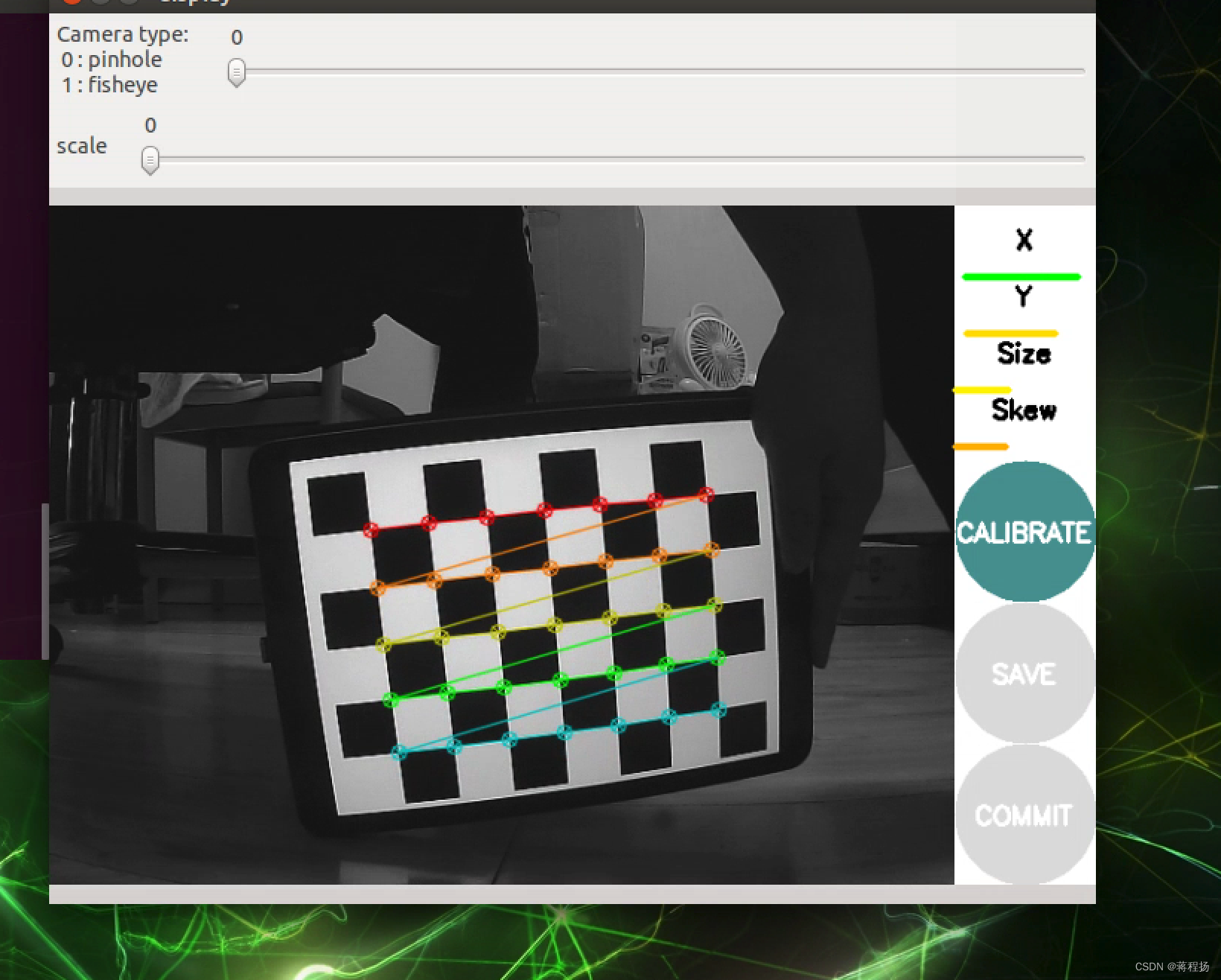
Ϊ�˴ﵽ���õı궨Ч��,��Ҫ���������Χ�ƶ��궨��,��������»�������:
(1)�ƶ��궨�嵽�����������,���ϡ��·���
(2)�ƶ��궨�嵽��Ұ���������Զ����
(3)�ƶ��궨��ʹ������������档
(4)���ֱ궨����б״̬��ʹ���ƶ��������������,���ϡ��·� ��
���궨���ƶ�������������ҷ�ʱ,��ʱ,���ڵ�x��ﵽ��С����ֵ��ͬ��,yָʾ�궨����ڻ��������λ��,size��ʾ�궨������Ұ�еľ���,Ҳ��������Ϊ�궨��������ͷ��Զ����skewΪ�궨������Ұ�е���бλ�á�ÿ���ƶ�֮��,�뱣�ֱ궨�岻��ֱ�����ڳ��ָ�����ʾ��
ֱ�����α�Ϊ��ɫ����calibration��ť����ʱ,�����Ѿ����㹻�����ݽ�������ͷ�ı궨,��ʱ�밴��calibration���ȴ�һ��������,�궨������ɻ�ɫ,�����в���,�������������
�����ɫ�ָ���,���save,�ͻ��Զ�������tmpĿ¼:

����tmpĿ¼��ѹ:

��ѹ����ost.yaml��Ϊ�궨���
����ת����ʽ:
rosrun camera_calibration_parsers convert ost.yaml camera.yaml

ת������camera.yaml��Ϊ����ROS�ڲθ�ʽ
���������ڲ�yaml����:
��Ҫע�����������ʹ�õ�uvc_camera���ܰ�ò��ֻ֧�ֵ�camera_name Ϊcamera�ĵ�Ŀ�������,дΪfront_camera��back_camera���ᱨ��
image_width: 640
image_height: 480
camera_name: camera
camera_matrix:
rows: 3
cols: 3
data: [626.3262036036353, 0, 300.5591565230002, 0, 627.3720075547461, 244.4302177150301, 0, 0, 1]
distortion_model: plumb_bob
distortion_coefficients:
rows: 1
cols: 5
data: [0.1367930342496266, -0.1715444663163723, 0.001436032994469869, -0.00732797305912324, 0]
rectification_matrix:
rows: 3
cols: 3
data: [1, 0, 0, 0, 1, 0, 0, 0, 1]
projection_matrix:
rows: 3
cols: 4
data: [643.0006713867188, 0, 296.6836730995783, 0, 0, 648.4296875, 244.9678966293577, 0, 0, 0, 1, 0]
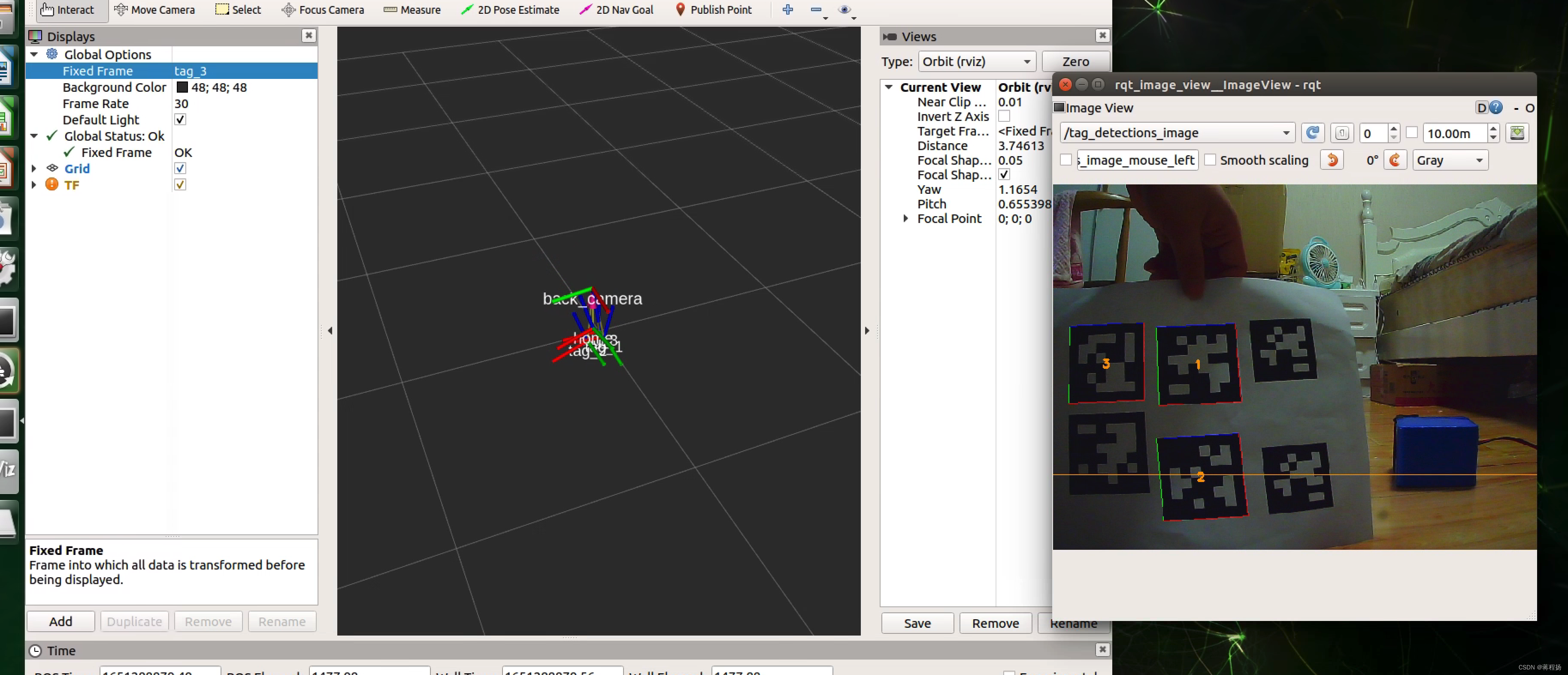
��,apriltagʶ��:
�������ܰ�:
roslaunch apriltag_ros continuous_detection.launch
�鿴launch����,������Ҫ��������:
��camera_name��image_topicΪ�Լ�ʵ��ʹ�õ�
<launch>
<arg name="launch_prefix" default="" /> <!-- set to value="gdbserver localhost:10000" for remote debugging -->
<arg name="node_namespace" default="apriltag_ros_continuous_node" />
<arg name="camera_name" default="/camera_rect" />
<arg name="image_topic" default="image_rect" />
<!-- Set parameters -->
<rosparam command="load" file="$(find apriltag_ros)/config/settings.yaml" ns="$(arg node_namespace)" />
<rosparam command="load" file="$(find apriltag_ros)/config/tags.yaml" ns="$(arg node_namespace)" />
<node pkg="apriltag_ros" type="apriltag_ros_continuous_node" name="$(arg node_namespace)" clear_params="true" output="screen" launch-prefix="$(arg launch_prefix)" >
<!-- Remap topics from those used in code to those on the ROS network -->
<remap from="image_rect" to="$(arg camera_name)/$(arg image_topic)" />
<remap from="camera_info" to="$(arg camera_name)/camera_info" />
<param name="publish_tag_detections_image" type="bool" value="true" /> <!-- default: false -->
</node>
</launch>
���л�Ҫ������ʶ�������ļ�:
�ҵ�apriltag�İ�װĿ¼,����config:

settings.yaml:
�������ӡ��Ϊtag36h11���͵�
tag_family: 'tag36h11' # options: tagStandard52h13, tagStandard41h12, tag36h11, tag25h9, tag16h5, tagCustom48h12, tagCircle21h7, tagCircle49h12 #֧�ֵ�һ��ǩ����
tag_threads: 2 # default: 2 # ����Tag_Threads��������APRILTAG 2�㷨��ijЩ�������в��м��㡣 ���͵Ķ��߳��ŵ����������
tag_decimate: 1.0 # default: 1.0 #��Сͼ��ֱ���
tag_blur: 0.0 # default: 0.0 #����tag_blur> 0ģ��ͼ��,tag_blur < 0��ͼ��
tag_refine_edges: 1 # default: 1 #��ǿ�˼��㾫��,������������
tag_debug: 0 # default: 0 #1Ϊ�����м�ͼ��~/.ros
max_hamming_dist: 2 # default: 2 (Tunable parameter with 2 being a good choice - values >=3 consume large amounts of memory. Choose the largest value possible.)
# Other parameters
publish_tf: true # default: false #����tf����
tags.yaml
standalone_tags����Ҫ��������������Ҫʶ���tag��Ӧ��id��size,size�Ļ���߳�,��Ҫ����ȷ,�������ʶ��ȷ��
standalone_tags:
[
{id: 0, size: 0.033,name: "home"}, #size��Ӧ��ǩ�Ĵ�С
{id: 1, size: 0.066},
{id: 2, size: 0.04},
{id: 3, size: 0.07},
{id: 4, size: 0.045}
]
tag_bundles:
[
]
����������launch,���ɽ���ʶ��
�ο�:
https://blog.csdn.net/lemonxiaoxiao/article/details/107719348
https://blog.csdn.net/qq_25241325/article/details/82705003

