����2021��,��ݮ�ɳ������¿�Ӧ����Raspberry Pi 400,��Ƶø�����һ��,�����������Ǹ���ݮ��,���������ı���д�ĺܺá������һ������,�α��ǵ��ԡ�,���Զ����������ҿ�������к�����ij嶯,�����ںܶ�Ӳ��ͨѶ����IJ����Լ�����һЩС����Ǻ��а�����,����ͼ��ʾ��

(ͼƬ��Դ��Buy a Raspberry Pi 400 Personal Computer Kit �C Raspberry Pi)
����պ�����һ��С��Ŀ,ͨ����ݮ��IIC�ɼ�Bosch?BMI08x IMU���ݲ�������̬����,Ȼ��ͨ�����ڻ�TCP�ķ�ʽ������PC�˽��п��ӻ��������������:
Ŀ¼
2. ����BMI08x IMU���ݻ�ȡ������̬����
3. UART��TCP���ݴ��䲢��rviz����ʾ
1. ��ݮ�ɵ�IICͨѶ
��ݮ�����е���MPU����Ĵ�����,��˿����������漶ϵͳ,Ҳ����RaspberryPi-OS (previously called Raspbian),Ӧ���ǻ���Linux�ں��ַ�װ��һ��UI�����µ���ݮ��ϵͳ������https://www.raspberrypi.com/software/���ص�,Ȼ��ͨ��Raspberry Pi Imager������ϵͳ��¼��һ��SD���ϡ�SD�ٲ�����ݮ���ϾͿ��Կ�ʼ���ˡ�
��ݮ��Ԥ����40�����ŵ�GPIO PIN,���Խ���IIC,SPI,UART��ͨѶ�Ŀ���,��֧��WIFI,����,�����ȡ����ն�����
sudo raspi-config�����ý���Щ�ӿ�ʹ�ܡ�����SSHʹ�ܻ���ͦ�����,��ΪĬ����ݮ��Ĭ����װ��VNC server��PC���ٰ�װVNC viewer�����Զ������ݮ��,������Ҫ����������ʾ����

?��Linux�µ�i2c-tools��һ���ܷ����i2c���Թ���(ͨ��sudo apt install i2c-tools��װ)�����Բ鿴�����˼���IIC�豸,�豸��ַ,��д�Ĵ����ȡ�

������ͼ,��ͨ��sudo i2cdetect -l���Բ鿴������1�������豸����ͨ��sudo i2cdetect -y 1�ɲ�ѯ������1������������IIC slave,��ַ�ֱ�Ϊ0x19��0x69����i2cdumpָ��ɻ�ȡ��ǰ�豸��ַ�ļĴ���0x0~0xFF��ֵ�����������ͦ����,�����ǻ�ȡIIC���豸��ַ��
- �����python����,��smbus���ʵ�ֶ�IICӲ���Ķ�д��
import smbus
bus = smbus.SMBus(1)
address = 0x68
bus.write_byte_data(address, 0x6B, 0x00) #д�Ĵ���
bus.read_byte_data(address, 0x0) #���Ĵ���
- �����C���Կ���,Ŀǰ��Ҫwiringpi��,Ҳ�dz����ס���Ҫ�������¡�
wiringPiSetup();
int dev_handle = wiringPiI2CSetup(0x19); //0x19Ϊ�豸��ַ
uint8_t register = 0x0;
uint8_t value = wiringPiI2CReadReg8(dev_handle, register); //���Ĵ���0,valueΪ��ȡ����ֵ
uint8_t value_write = 0xF;
value = wiringPiI2CReadReg8(dev_handle, register, value_write); //д�Ĵ���0��ֵΪ0xF- ��Ȼ��Ҳ���������д���ͨ��GPIO������дIICЭ��,?���
��ݮ�ɵ�IICͨѶ�����͵��Ծ��ܽᵽ�⡣
2. ����BMI08x IMU���ݻ�ȡ������̬����
2.1 IMU���ݻ�ȡ
��ǰ�Ƚϻ��IMU��InvenSense��˾����MPUϵ��,����BoschҲ��ʼ���������BMI08xϵ�вɼ�����(BMI088��bmi085���źͼĴ������弸��һ��,ֻ�����̵ȷ����в��),���������ֲ������Inertial Measurement Unit BMI088 | Bosch Sensortec���ص����ٷ�����������ʾ������(https://github.com/BoschSensortec/BMI08x-Sensor-API),����Ҫ���������������Application board 3.0����������á�������������README��˵,���Լ��Ĺ���������bmi08a.c, bmi08g.c,bmi08x_defs.h and bmi08x.h�ͺ��ˡ�����,�һ���������һ��������STM32����SPIͨѶ��ʽʵ�ֵ�����GitHub - SEASKY-Master/BMI088_Master,������ʾЧ������ԴBMI088������̬������_��������_bilibili-#BMI088# #������̬������# #STM32f405RGT6#��Դһ��BMI088������̬������,�����ͨ��̬�������к����ƴ���Լ��ٶ�һ��,�ͻ�֪���˿�Դ�ֿ�����:https://github.com/SEASKY-Master/BMI088_Master https://www.bilibili.com/video/BV1Dp4y1C7rC
https://www.bilibili.com/video/BV1Dp4y1C7rC
�����Ҳο��ٷ�����read_sensor_data���̡���common.c�ļ��¶�IIC�Ĵ����Ķ�д��������,���¡�
common.h
/**\
* Copyright (c) 2021 Bosch Sensortec GmbH. All rights reserved.
*
* SPDX-License-Identifier: BSD-3-Clause
**/
#ifndef COMMON_H
#define COMMON_H
/*! CPP guard */
#ifdef __cplusplus
extern "C" {
#endif
#include <stdio.h>
#include <wiringPi.h>
#include <wiringPiI2C.h>
#include "bmi08x_defs.h"
/*!
* @brief Function for reading the sensor's registers through I2C bus.
*
* @param[in] reg_addr : Register address.
* @param[out] reg_data : Pointer to the data buffer to store the read data.
* @param[in] length : No of bytes to read.
* @param[in] intf_ptr : Interface pointer
*
* @return Status of execution
* @retval = BMI08X_INTF_RET_SUCCESS -> Success
* @retval != BMI08X_INTF_RET_SUCCESS -> Failure Info
*
*/
BMI08X_INTF_RET_TYPE bmi08x_i2c_read(uint8_t reg_addr, uint8_t *reg_data, uint32_t len, void *intf_ptr);
/*!
* @brief Function for writing the sensor's registers through I2C bus.
*
* @param[in] reg_addr : Register address.
* @param[in] reg_data : Pointer to the data buffer whose value is to be written.
* @param[in] length : No of bytes to write.
* @param[in] intf_ptr : Interface pointer
*
* @return Status of execution
* @retval = BMI08X_INTF_RET_SUCCESS -> Success
* @retval != BMI08X_INTF_RET_SUCCESS -> Failure Info
*
*/
BMI08X_INTF_RET_TYPE bmi08x_i2c_write(uint8_t reg_addr, const uint8_t *reg_data, uint32_t len, void *intf_ptr);
/*!
* @brief This function provides the delay for required time (Microsecond) as per the input provided in some of the
* APIs.
*
* @param[in] period_us : The required wait time in microsecond.
* @param[in] intf_ptr : Interface pointer
*
* @return void.
*
*/
void bmi08x_delay_us(uint32_t period, void *intf_ptr);
/*!
* @brief Function to select the interface between SPI and I2C.
*
* @param[in] bma : Structure instance of bmi08x_dev
* @param[in] intf : Interface selection parameter
* For I2C : BMI08X_I2C_INTF
* For SPI : BMI08X_SPI_INTF
* @param[in] variant : Sensor variant parameter
* For BMI085 : BMI085_VARIANT
* For BMI088 : BMI088_VARIANT
*
* @return Status of execution
* @retval 0 -> Success
* @retval < 0 -> Failure Info
*/
int8_t bmi08x_interface_init(struct bmi08x_dev *bma, uint8_t intf, uint8_t variant);
/*!
* @brief Prints the execution status of the APIs.
*
* @param[in] api_name : Name of the API whose execution status has to be printed.
* @param[in] rslt : Error code returned by the API whose execution status has to be printed.
*
* @return void.
*/
void bmi08x_error_codes_print_result(const char api_name[], int8_t rslt);
#ifdef __cplusplus
}
#endif /* End of CPP guard */
#endif /* COMMON_H */common.c
/**
* Copyright (C) 2021 Bosch Sensortec GmbH. All rights reserved.
*
* SPDX-License-Identifier: BSD-3-Clause
*/
#include <stdint.h>
#include <stdlib.h>
#include <stdio.h>
#include <unistd.h>
#include "common.h"
/******************************************************************************/
/*! Macro definitions */
#define BMI08X_READ_WRITE_LEN UINT8_C(46)
int dev_acc;
int dev_gyro;
/******************************************************************************/
/*! Static variable definition */
/*! Variable that holds the I2C device address or SPI chip selection for accel */
uint8_t acc_dev_add;
/*! Variable that holds the I2C device address or SPI chip selection for gyro */
uint8_t gyro_dev_add;
/******************************************************************************/
/*! User interface functions */
/*!
* I2C read function map to COINES platform
*/
BMI08X_INTF_RET_TYPE bmi08x_i2c_read(uint8_t reg_addr, uint8_t *reg_data, uint32_t len, void *intf_ptr)
{
uint8_t dev_addr = *(uint8_t*)intf_ptr;
int fd;
if(dev_addr == 0x18 || dev_addr == 0x69)
fd = dev_acc;
else if (dev_addr == 0x68 || dev_addr == 0x69)
fd = dev_gyro;
else
return -1;
if(len == 1)
{
int tmp = wiringPiI2CReadReg8(fd, reg_addr);
printf("Device %d read register 0x%x value = 0x%x\n", fd, reg_addr, tmp);
reg_data[0] = ((uint8_t)tmp);
return 0;
}
printf("The reading length is %d \n", len);
int i = 0;
for(i = 0; i < len; i++)
{
int tmp = wiringPiI2CReadReg8(fd, reg_addr+i);
printf("Device %d read register 0x%x value = 0x%x\n", fd, reg_addr+i, tmp);
reg_data[i] = ((uint8_t)tmp);
}
return 0;
}
/*!
* I2C write function map to COINES platform
*/
BMI08X_INTF_RET_TYPE bmi08x_i2c_write(uint8_t reg_addr, const uint8_t *reg_data, uint32_t len, void *intf_ptr)
{
uint8_t dev_addr = *(uint8_t*)intf_ptr;
int fd;
if(dev_addr == 0x18 || dev_addr == 0x69)
fd = dev_acc;
else if (dev_addr == 0x68 || dev_addr == 0x69)
fd = dev_gyro;
else
return -1;
if(len == 1)
{
int tmp = wiringPiI2CWriteReg8(fd, reg_addr, reg_data[0]);
printf("Device %d write register 0x%x value = 0x%x\n", fd, reg_addr, reg_data[0]);
return 0;
}
printf("The writing length is %d \n", len);
int i = 0;
for(i = 0; i < len; i++)
{
int tmp = wiringPiI2CWriteReg8(fd, reg_addr+i, reg_data[i]);
printf("Device %d write register 0x%x value = 0x%x\n", fd, reg_addr+i, reg_data[i]);
}
return 0;
}
/*!
* Delay function map to COINES platform
*/
void bmi08x_delay_us(uint32_t period, void *intf_ptr)
{
usleep(period*10);
}
/*!
* @brief Function to select the interface between SPI and I2C.
* Also to initialize coines platform
*/
int8_t bmi08x_interface_init(struct bmi08x_dev *bmi08x, uint8_t intf, uint8_t variant)
{
int8_t rslt = BMI08X_OK;
if (bmi08x != NULL)
{
/* Bus configuration : I2C */
if (intf == BMI08X_I2C_INTF)
{
printf("I2C Interface \n");
/* To initialize the user I2C function */
acc_dev_add = BMI08X_ACCEL_I2C_ADDR_PRIMARY;
gyro_dev_add = BMI08X_GYRO_I2C_ADDR_PRIMARY;
bmi08x->intf = BMI08X_I2C_INTF;
bmi08x->read = bmi08x_i2c_read;
bmi08x->write = bmi08x_i2c_write;
}
/* Selection of bmi085 or bmi088 sensor variant */
bmi08x->variant = variant;
/* Assign accel device address to accel interface pointer */
bmi08x->intf_ptr_accel = &acc_dev_add;
/* Assign gyro device address to gyro interface pointer */
bmi08x->intf_ptr_gyro = &gyro_dev_add;
/* Configure delay in microseconds */
bmi08x->delay_us = bmi08x_delay_us;
/* Configure max read/write length (in bytes) ( Supported length depends on target machine) */
bmi08x->read_write_len = BMI08X_READ_WRITE_LEN;
}
else
{
rslt = BMI08X_E_NULL_PTR;
}
return rslt;
}
/*!
* @brief Prints the execution status of the APIs.
*/
void bmi08x_error_codes_print_result(const char api_name[], int8_t rslt)
{
if(rslt == BMI08X_OK)
printf("%s --- successful\r\n", api_name);
if (rslt != BMI08X_OK)
{
printf("%s\t", api_name);
if (rslt == BMI08X_E_NULL_PTR)
{
printf("Error [%d] : Null pointer\r\n", rslt);
}
else if (rslt == BMI08X_E_COM_FAIL)
{
printf("Error [%d] : Communication failure\r\n", rslt);
}
else if (rslt == BMI08X_E_DEV_NOT_FOUND)
{
printf("Error [%d] : Device not found\r\n", rslt);
}
else if (rslt == BMI08X_E_OUT_OF_RANGE)
{
printf("Error [%d] : Out of Range\r\n", rslt);
}
else if (rslt == BMI08X_E_INVALID_INPUT)
{
printf("Error [%d] : Invalid input\r\n", rslt);
}
else if (rslt == BMI08X_E_CONFIG_STREAM_ERROR)
{
printf("Error [%d] : Config stream error\r\n", rslt);
}
else if (rslt == BMI08X_E_RD_WR_LENGTH_INVALID)
{
printf("Error [%d] : Invalid Read write length\r\n", rslt);
}
else if (rslt == BMI08X_E_INVALID_CONFIG)
{
printf("Error [%d] : Invalid config\r\n", rslt);
}
else if (rslt == BMI08X_E_FEATURE_NOT_SUPPORTED)
{
printf("Error [%d] : Feature not supported\r\n", rslt);
}
else if (rslt == BMI08X_W_FIFO_EMPTY)
{
printf("Warning [%d] : FIFO empty\r\n", rslt);
}
else
{
printf("Error [%d] : Unknown error code\r\n", rslt);
}
}
}
��Ȼ��Ҫ������ݮ�ɳ�ʼ���Ͱ��ӳ�ʼ��(����һЩ�ߵ͵�ƽ,����,���̵�)�IJ���,������Է���һ���ļ��¶��塣
bool rasp_init()
{
// raspberry pi setting
if(-1 == wiringPiSetup())
{
std::cout << "setup error\n";
return false;
}
// Handle of acc
dev_acc = wiringPiI2CSetup(0x19);
if (dev_acc == -1)
{
std::cout << "no accel(BMI088) i2c device found \n";
return false;
}
else
{
std::cout << "accel(BMI088) i2c device found: " << dev_acc << "\n";
}
// Handle of gyro
dev_gyro = wiringPiI2CSetup(0x69);
if (dev_gyro == -1)
{
std::cout << "no gyro(BMI088) i2c device found \n";
return false;
}
else
{
std::cout << "gyro(BMI088) i2c device found: " << dev_gyro << "\n";
}
return true;
}
/*!
* @brief This internal API is used to initializes the bmi08x sensor
* settings like power mode and OSRS settings.
*
* @param[in] void
*
* @return void
*
*/
static int8_t init_bmi08x(void)
{
int8_t rslt;
rslt = bmi08a_init(&bmi08xdev);
bmi08x_error_codes_print_result("bmi08a_init", rslt);
if (rslt == BMI08X_OK)
{
rslt = bmi08g_init(&bmi08xdev);
bmi08x_error_codes_print_result("bmi08g_init", rslt);
}
if (rslt == BMI08X_OK)
{
printf("Uploading config file !\n");
rslt = bmi08a_load_config_file(&bmi08xdev);
bmi08x_error_codes_print_result("bmi08a_load_config_file", rslt);
}
if (rslt == BMI08X_OK)
{
bmi08xdev.accel_cfg.odr = BMI08X_ACCEL_ODR_1600_HZ;
if (bmi08xdev.variant == BMI085_VARIANT)
{
bmi08xdev.accel_cfg.range = BMI085_ACCEL_RANGE_16G;
}
else if (bmi08xdev.variant == BMI088_VARIANT)
{
bmi08xdev.accel_cfg.range = BMI088_ACCEL_RANGE_24G;
}
bmi08xdev.accel_cfg.power = BMI08X_ACCEL_PM_ACTIVE; /*user_accel_power_modes[user_bmi088_accel_low_power]; */
bmi08xdev.accel_cfg.bw = BMI08X_ACCEL_BW_NORMAL; /* Bandwidth and OSR are same */
rslt = bmi08a_set_power_mode(&bmi08xdev);
bmi08x_error_codes_print_result("bmi08a_set_power_mode", rslt);
rslt = bmi08a_set_meas_conf(&bmi08xdev);
bmi08x_error_codes_print_result("bmi08a_set_meas_conf", rslt);
bmi08xdev.gyro_cfg.odr = BMI08X_GYRO_BW_230_ODR_2000_HZ;
bmi08xdev.gyro_cfg.range = BMI08X_GYRO_RANGE_250_DPS;
bmi08xdev.gyro_cfg.bw = BMI08X_GYRO_BW_230_ODR_2000_HZ;
bmi08xdev.gyro_cfg.power = BMI08X_GYRO_PM_NORMAL;
rslt = bmi08g_set_power_mode(&bmi08xdev);
bmi08x_error_codes_print_result("bmi08g_set_power_mode", rslt);
rslt = bmi08g_set_meas_conf(&bmi08xdev);
bmi08x_error_codes_print_result("bmi08g_set_meas_conf", rslt);
}
return rslt;
}��ʼ����ɺ���ֱ�ӵ���bmi08a.c��bmi08g.c�����bmi08a_get_data��bmi08g_get_data�����ֱ��ȡ���ٶȺͽ��ٶ������ˡ�����ϸ���˹ٷ�������,���ò�˵д�������Ͻ��淶��
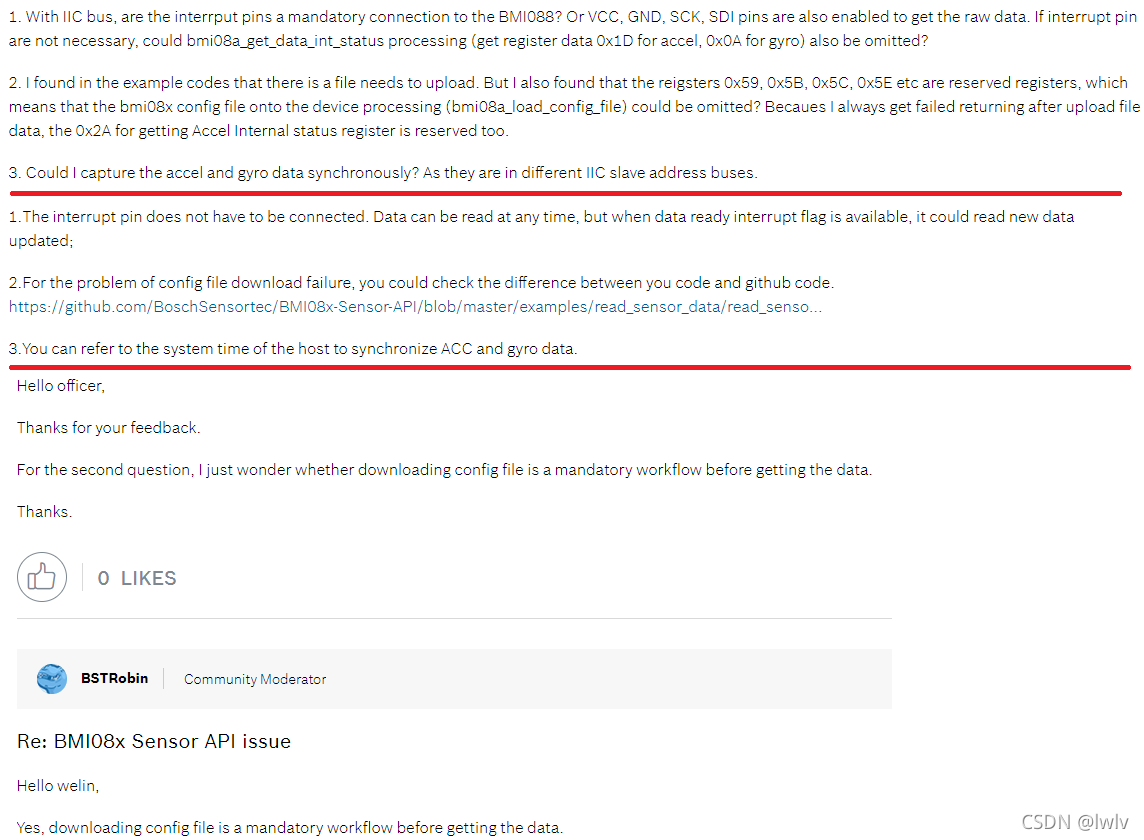
�����ȽϿӵ���,�ϴ������ļ��ͻ�ȡ���ٶȼƺ�������״̬��������,�Ҳ������ֲ�,ѹ����û�ж����ϴ����ò����ļĴ���,�������һ��ڹٷ���̳��ѯ,Ҳ�п����DZ����Ժ��ðɡ�
?��֮,IIC���ݿ���ͨ����ݮ�ɻ�ȡ���ˡ�
2.2 ��̬�����㷨
��̬������ָͨ��6�����9������ͨ���ںϵȷ�ʽ�õ���ά�ռ��и������̬��������ά�ռ��и�����̬�ķ�����ŷ����,��ת�������Ԫ��,������֮�䶼���ת��������ŷ���Ǵ�������ֵ����(������),��ת������ڲ������������������������,һ���ڼ�����в�����Ԫ���ķ�ʽȥ������
������̬����,���õ��㷨�����¼���:
- �������˲���EKF
- Mahony�ķ������Ҿ����㷨
- Madgwick���ݶ��½���̬�����㷨
��Щ�㷨���϶������ҵ��ֳɵ�,������python,matlab����C����Ŀǰ��ʱֻ������complementary filter����,����https://github.com/ccny-ros-pkg/imu_tools���ҵ�,��һ��ComplementaryFilter���ʵ����,Ҳ�ܷ�����ֲ,����õ�������Ԫ���ĸ�����,�Լ����ٶ�����֮���ֵ��
3. UART��TCP���ݴ��䲢��rviz����ʾ
3.1 UARTͨѶ
ǰ�澭����ݮ�ɵ����ݲɼ��Լ���̬����,������Ҫ�������ٴ��ϴ���PC�˽���ԭʼ���ݷ����Ϳ��ӻ�����ݮ�ɿɽ��еķ�����TTL����ͨѶ,����������wifi����ʽͨ��tcp/ipЭ����д��䡣�����Ǵ��ڻ���TCP���ɲ��ñ���modbus serial/tcpЭ��,��python�µ�modbus_tk��,C����ʵ�ֵ�libmodbus���,������ר�Ż�ʱ��˵�������⡣
��ֱ��ʹ�õ�����Э��,Ҳ�Ǻܶ�IMUģ�鹫˾���õ�,������0x55��ͷ,Ȼ����㳤�Ⱥ�У��λ��
��ݮ������������,Ĭ�Ͻ� serial0 ӳ�䵽���GPIO��15��16��,�� serial1 ӳ�䵽BT�����ϡ�

���Ϻܶ�˵��Ҫ��������ӳ�以��һ��,Ҳ����ͨ������/boot/config.txt�ļ�,�ں������dtoverlay=pi3-miniuart-bt��
�������ȿ��ٷ���/boot/overlays/README�����һ�仰��Ҳ�������ʹ����ݮ��ϵͳ���ǿ���ֱ��ͨ����/dev/serial0�ķ�ʽ���ڼ��ɡ�

������:
- /dev/ttyS0 �����ǵ�Ƭ���е�һ��һ���ֽ�ȥ��ѯ�����жϡ�
- /dev/ttyAMA0 �����Ǵ��ڿ�����Ӳ���� FIFO/DMA ��
?Ҳ���Ǽ��㲻����Ҳ����ֱ���á����ο��ٷ�˵ֱ��ʹ��/dev/serial0���Ƽ����÷���
ͬ�����ںͷ�������Ҳ������wiringPI�⡣
int fd;
if(wiringPiSetup() < 0)
return NULL;
if((fd = serialOpen("/dev/serial0", 115200))<0)
{
printf("Serial Open Failed!\n");
return NULL;
}
else
printf("Serial Open Succeed!\n");������wiringPI��дָ���ʱ��,��Ĭ�Ͻ�0������ֹ��������Linux�»��������ļ�����,
��ֱ��ʹ��ssize_t write (int fd, const void * buf, size_t count)��ssize_t read(int fd, void * buf, size_t count)���ж�д������
3.2 rviz��ʾ
rviz��ROS����Ŀ��ӻ�����,���Ƿdz�ǿ����,����������������Ϸ����OGRE�������ʹ���������װ��ROS�������ô��ڽ�PC�˵��������ڵ�ַӳ�䵽�������Linuxϵͳ,�����COM1�Ͷ�ӦLinux�µ�ttyS0����Ȼ���ǻ���Ҫ�����Ŀ�ִ��Ȩ��,sudo chmod 777 /dev/ttyUSB0��

?ROS��serial������kinetic��melodic����,������������Դ����������Լ��Ĺ������á�
������ʾ,�����ʹ��imut_tools�µ�rviz_imu_plugin����,������rviz��add plugin�����ҵ�rviz_imu_plugin��

?����������:


Enjoy!
?