�������߳�
2.1 ���̵Ķ��塢��ɡ���֯������
2.1.1���̵Ķ���
����:����һ��ָ������
���ڵļ����ֻ֧�ֵ������� --> ������������֮��,Ϊ�˷������ϵͳ����,��ɸ�����ִ��,�����˽��̡�����ʵ��ĸ���
����ʵ��(����ӳ��):��PCB������Ρ����ݶ������ֹ��ɡ�һ�������,���ǰѽ���ʵ��ͼ��Ϊ����,����,��ν��������,ʵ�����Ǵ�������ʵ���е�PCB;����������,ʵ�����dz�������ʵ���е�PCB��
ע��:PCB�ǽ��̴��ڵ�Ψһ��־

2.1.2 ���̵����
����(����ʵ��)�ɳ���Ρ����ݶΡ�PCB��������ɡ�



2.1.3 ���̵���֯

2.1.3.1 ���ӷ�ʽ
���в�ͬ��ָ��,��ͬ��ָ��ָ��ͬ��״̬

2.1.3.2 ������ʽ
���������ӷ�ʽ,Ψһ��ͬ��������������

2.1.4 ���̵�����

2.1.5 �ܽ�

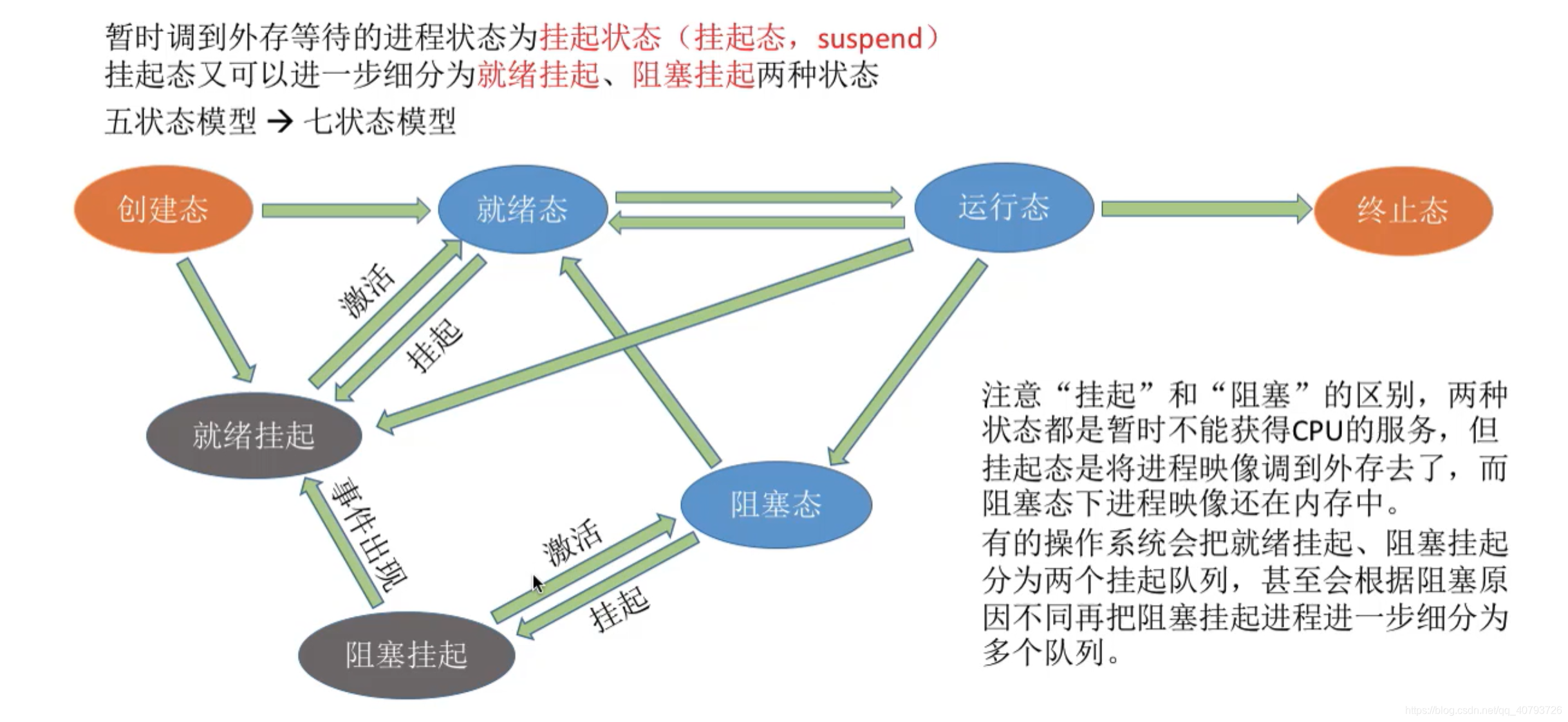
2.2 ���̵�״̬��ת��
2.2.1 ���̵�״̬

��������״̬:

2.2.2 ����״̬��ת��

2.2.3 �ܽ�

2.3 ���̿���
2.3.1 ʲô�ǽ��̿���
���̿��Ƶ���Ҫ�����Ƕ�ϵͳ�е����н���ʵʩ��Ч�Ĺ���,�����д����½��̡��������н��̡�ʵ�ֽ���״̬ת���ȹ��ܡ�
������:�������̿��ƾ���Ҫʵ�ֽ���״̬ת��

2.3.2 ���ʵ�ֽ��̿���?
��ԭ��ʵ�ֽ��̿��ơ�ԭ����ص���ִ���ڼ䲻�����ж�,ֻ��һ���dzɡ�
���ֲ��ɱ��жϵIJ�����ԭ�Ӳ�����
ԭ����á����ж�ָ��͡����ж�ָ�ʵ��

2.3.3 ���̿�����ص�ԭ��




2.3.4 �ܽ�

2.4 ����ͨ��

2.4.1 ʲô�ǽ���ͨ��
����˼��,����ͨ�ž���ָ����֮�����Ϣ������
�����Ƿ���ϵͳ��Դ�ĵ�λ(�����ڴ��ַ�ռ�),��˸�����ӵ�е��ڴ��ַ�ռ��������Ϊ�˱�֤��ȫ,һ�����̲���ֱ�ӷ�����һ�����̵ĵ�ַ�ռ䡣
���ǽ���֮�����Ϣ�������DZ���ʵ�ֵġ�Ϊ�˱�֤���̼�İ�ȫͨ��,����ϵͳ�ṩ��һЩ������
����ͨ�ŵ�����:����ʱ�����ݷ���������,��ô�ź���������ͨ�ŵ�
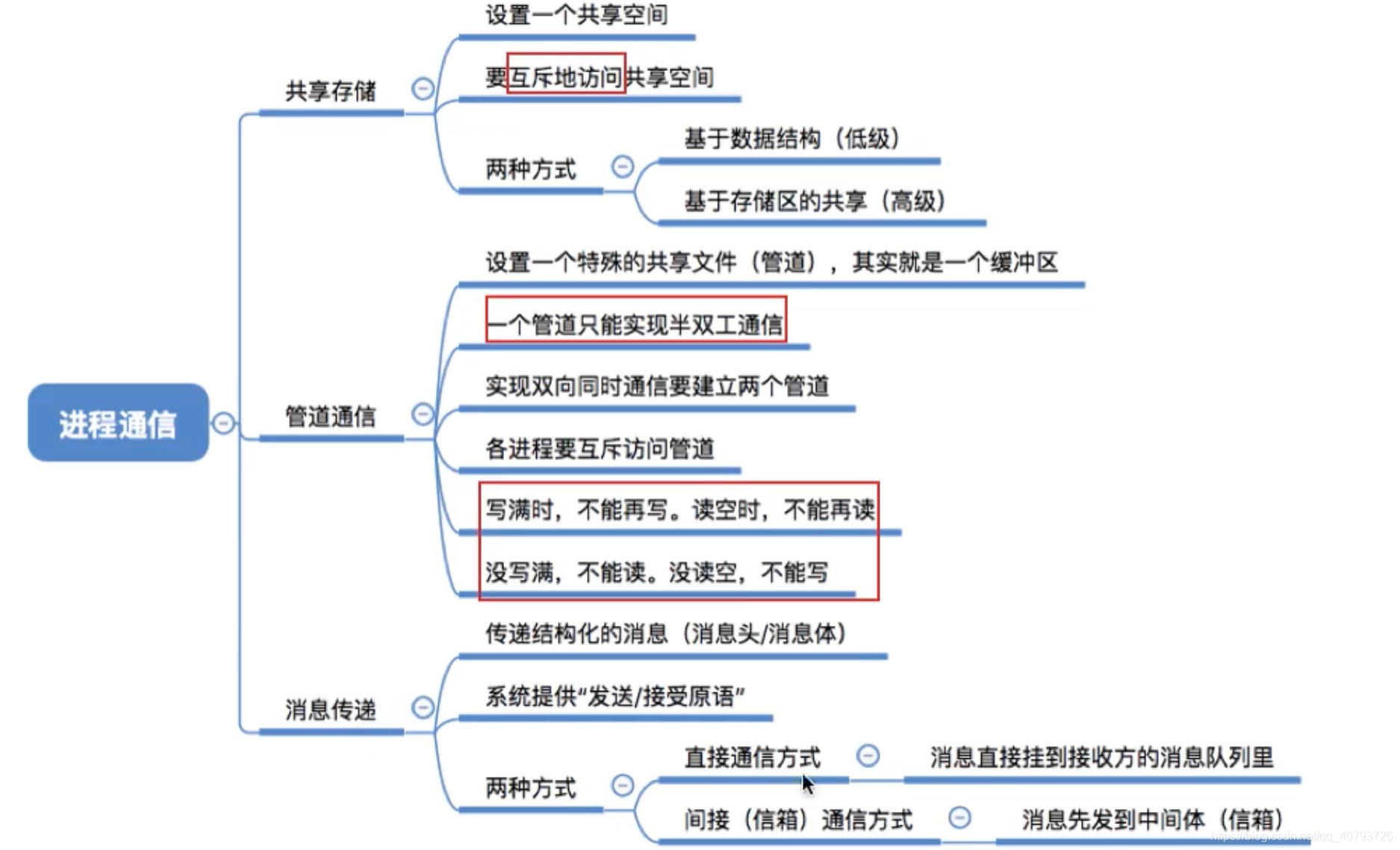
2.4.2 �����洢
����һ�ͽ��̶�����һ���ռ�,����ϵͳ�ṩ�����ռ��ͬ�������,����һ�ͽ��̶�������ͬʱʹ�ù����ռ�,���ǶԹ����ռ�ķ����ǻ���ġ�
�����洢��Ϊ:
- �������ݽṹ�Ĺ���:���繲���ռ���ֻ�ܷ�һ������Ϊ10�����顣���ֹ�����ʽ�ٶ��������ƶ�,��һ-�ֵͼ�ͨ�ŷ�ʽ
- ���ڴ洢���Ĺ���:���ڴ��л���һ�鹲���洢��,���ݵ���ʽ�����λ�ö��ɽ��̿���,�����Dz���ϵͳ�����֮��,���ֹ�����ʽ�ٶȸ���,��һ�ָ�ͨ�ŷ�ʽ��
2.4.3 �ܵ�ͨ��

���ܵ�"�����������Ӷ�д���̵�һ�������ļ�,��ʵ�������ڴ��п���һ����С�̶��Ļ�����
�ܵ���ȡ��˫��ͨ��,�����Ҫʵ��˫��ͬʱͨ��,��Ҫ���������ܵ�;
���̻�����ʹܵ�,����1д����д��,����2��ȡ,ȡ��ܵ��е�����,����1�ſ��Խ���д��;
�ܵ�ûд������,û���겻д,һ������ֻ�ܱ���ȡһ��
2.4.4 ��Ϣ����
���̼�����ݽ�������ʽ������Ϣ( Message)Ϊ��λ������ͨ������ϵͳ�ṩ�ġ� ������Ϣ/������Ϣ������ԭ��������ݽ�����
��Ϣ���ݵ����ַ�ʽ:
- ֱ��ͨ�ŷ�ʽ:��Ϣֱ�ӹҵ����ս��̵���Ϣ���������
- ���ͨ�ŷ�ʽ:��ϢҪ�ȷ��͵��м�ʵ��(����)��,���Ҳ�ơ�����ͨ�ŷ�ʽ����Eg: �����еĵ����ʼ�ϵͳ
2.4.5 �ܽ�
2.5 �̡߳����߳�ģ��

��:ʲô���߳�,ΪʲôҪ�����߳�?
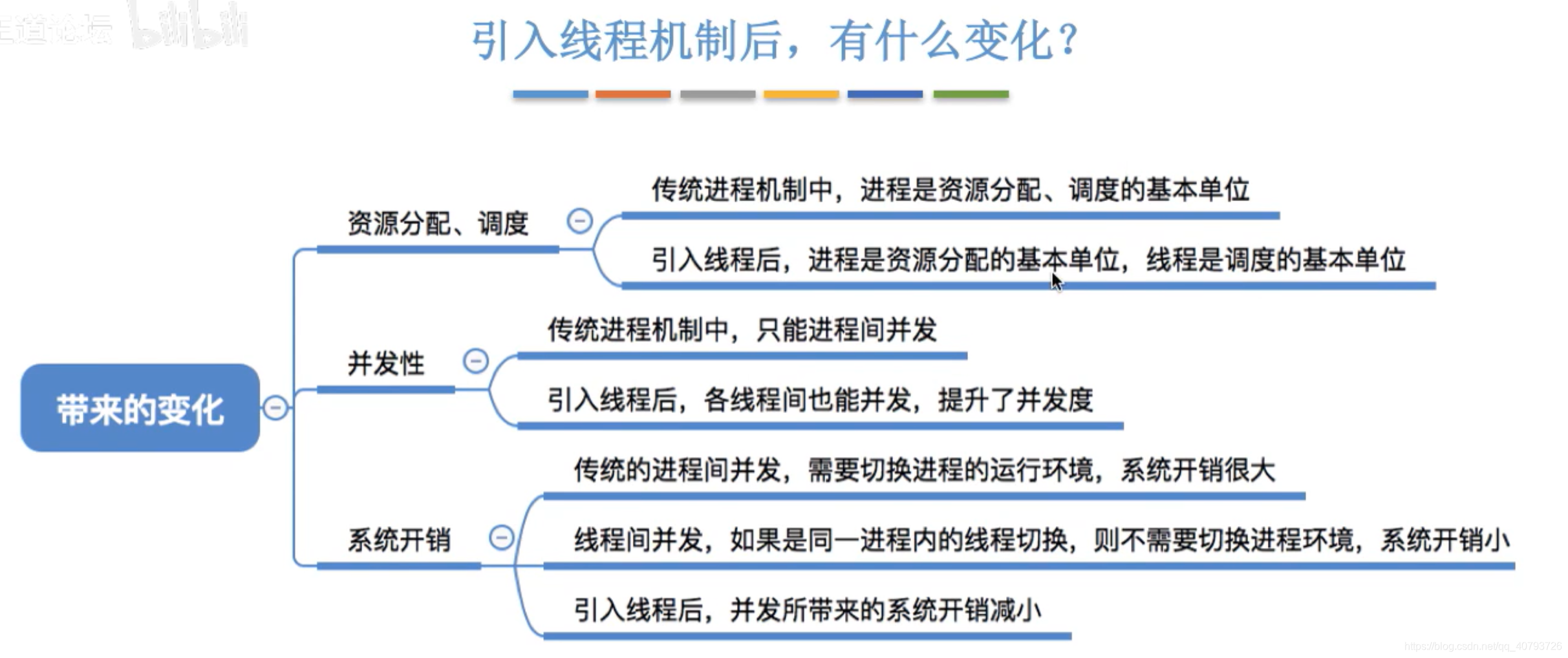
�еĽ��̿�����Ҫ"ͬʱ"���ܶ���,���ڽ����д����˶��ִ����,Ϊ��,�������߳������Ӳ����ȡ���Щ������Ȼ��Ҫ�ò�ͬ�ļ��γ������ʵ��, �����⼸�γ���Ҫ��������
�߳���һ��������CPUִ�е�Ԫ,Ҳ�dz���ִ��������С��λ��
�����̺߳�,����֮����Բ���,�����ڵĸ��߳�֮��Ҳ���Բ���,����ֻ��Ϊ��CPU֮���ϵͳ��Դ�ķ��䵥Ԫ

2.5.1 �̵߳�ʵ�ַ�ʽ
- �û����߳�:�û����߳���Ӧ�ó���ͨ���߳̿�ʵ�֡����е��̹߳�����������Ӧ�ó�����(�����߳��л�),���û����̡߳����Ǵ��û��ӽǿ��Կ������߳�,�û����Կ����̵߳Ĵ���,���Dz���ϵͳֻ�ܿ����û�����
- �ں˼��߳�:�����ں���̬���л�,�Ӳ���ϵͳ�ں��ӽ��ܿ������߳�
�ص��ص�:
����ϵͳֻ�����ü����ں˼��߳�,���ֻ���ں˼��̲߳��Ǵ���������ĵ�λ

����ͼ,�������ǵ�����4��,������3���û�,��Ϊֻ�������ں˼��߳�,����ֻ�ᱻ���䵽��������,�������������ġ�
2.5.2 ���߳�ģ��
��ͬʱ֧���û����̺߳��ں˼��̵߳�ϵͳ��,�ɼ����û����߳�ӳ�䵽�����ں˼��̵߳�������
���ˡ����߳�ģ�͡����⡣
- ���һ:����û��߳�ӳ�䵽һ���ں˼��߳�
- �ŵ�:�û����̵߳��л����û��ռ伴�����,�̹߳���ϵͳ����С,Ч�ʸ�
- ȱ��:��һ���û����̱߳�������,�������̶��ᱻ����,�����Ȳ���

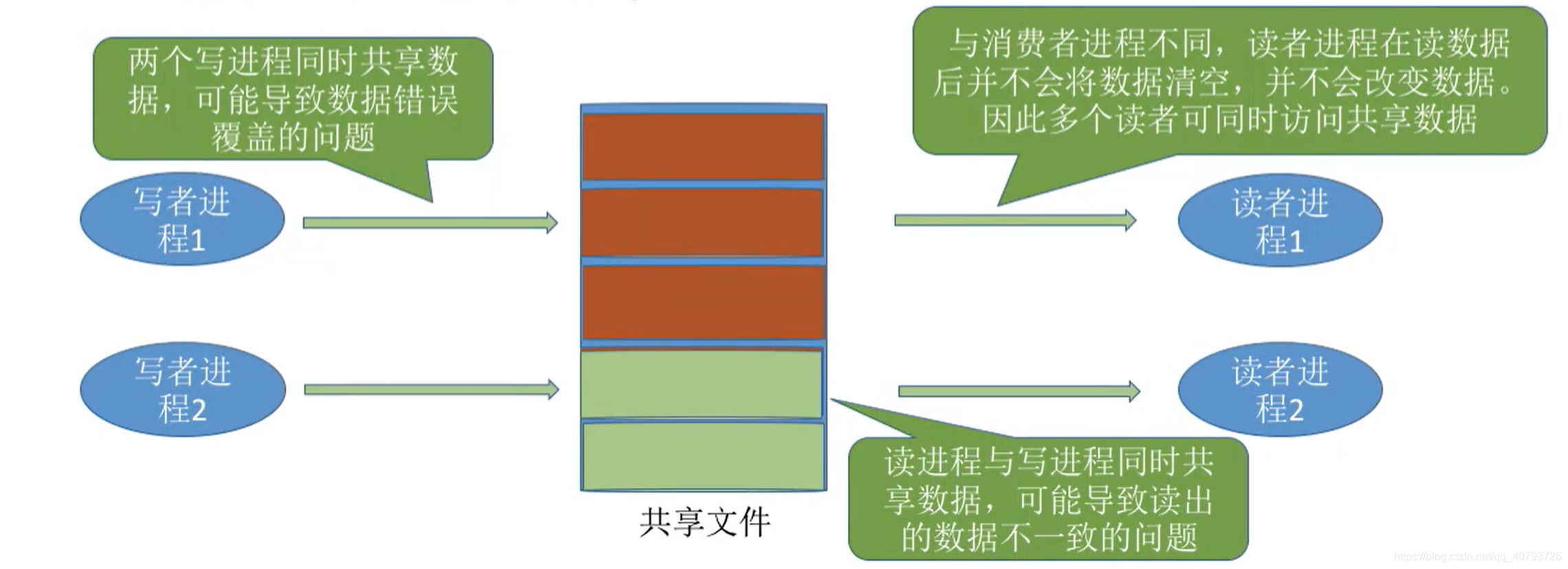
2.6 ����������
�����ȡ��о�������:��Դ����,һ������û�취ͬʱ����,����ȷ��ij�ֹ���������������Щ�����˳��
����������,���ǴӾ��������а���һ�����㷨ѡ��һ�����̲��������������������,��ʵ�ֽ��̵IJ���ִ�С�
����֪ʶ:����̬����״̬ģ��

2.6.1 ���̵���(�ͼ�����)
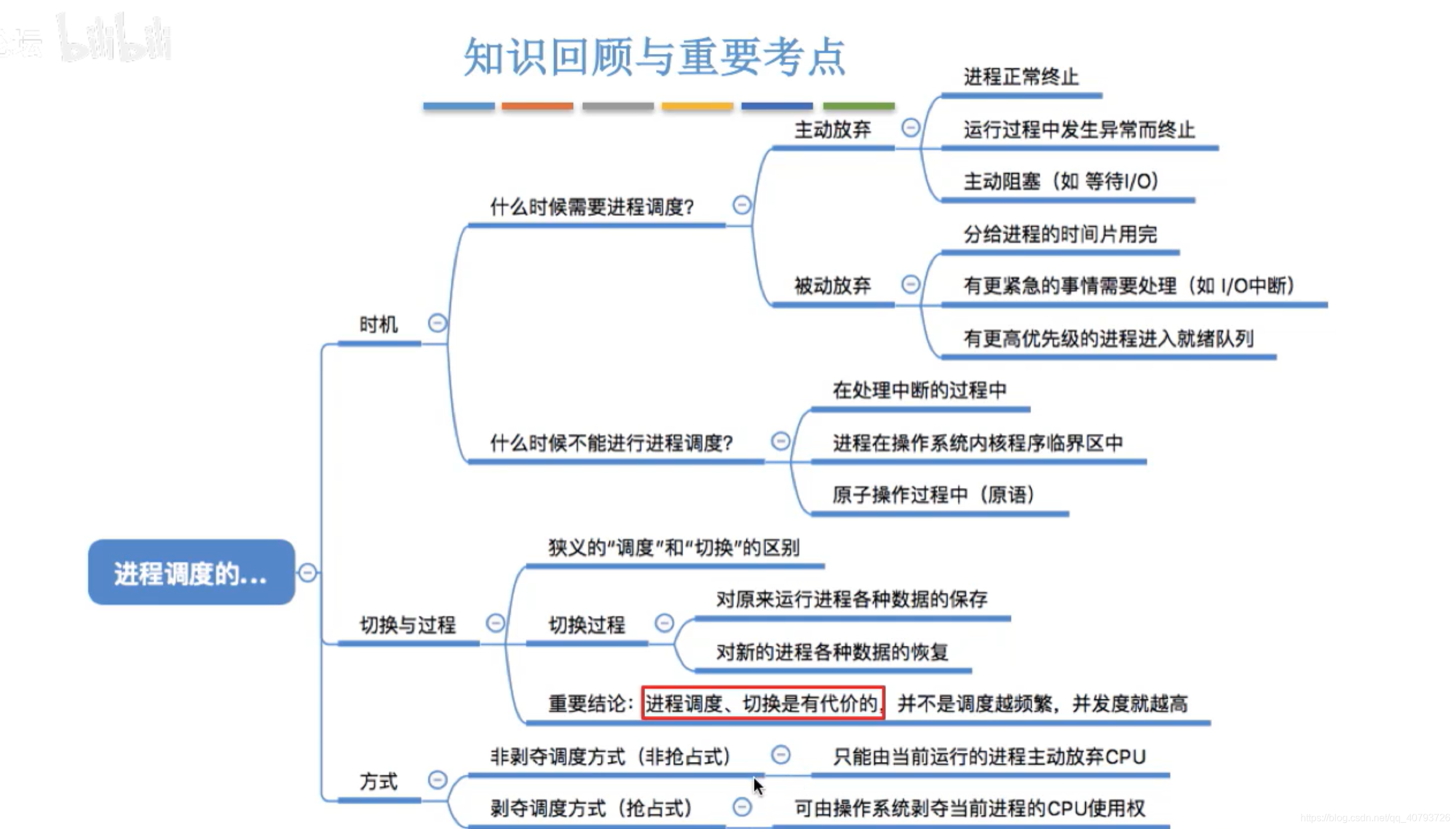
2.6.1.1 ���̵��ȵ�ʱ��
- ��Ҫ���н��̵������л������:
- ���н�����������:������ֹ,���й��̷����쳣����ֹ,����������������
- ���н��̱�������:�ָ����̵�ʱ��Ƭ����,��������������Ҫ����,�������ȼ��Ľ��̽���
- ���ܽ��н��̵���:
- �����жϵĹ���
- �����ڲ���ϵͳ�ں˳����ٽ�����,��ͨ�ٽ������Խ��е��Ⱥ��л���
- ԭ�Ӳ���������
2.6.1.2 ���̵��ȵķ�ʽ
- �ǰ�����ȷ�ʽ,�ֳƷ���ռ��ʽ����,ֻ�����������������������������й����м����и����ȵ�����,��ǰ������Ȼ�����ʹ�ô�����,ֱ���ý�����ֹ������Ҫ���������̬��
- ������ȷ�ʽ,�ֳ���ռ��ʽ����һ���������ڴ�������ִ��ʱ,�����һ������Ҫ������ȵĽ�����Ҫʹ�ô�����,��������ͣ����ִ�еĽ���,�����������������Ҫ���ȵ��Ǹ����̡�
2.6.1.3 ���̵��л������

�����л��Ĺ�����Ҫ���:
��ԭ�������̸߳������ݵı���,���½��̸������ݵĻָ�
���̵��л�����Ƶ��ʹ������ϵͳ��Ч�ʽ���
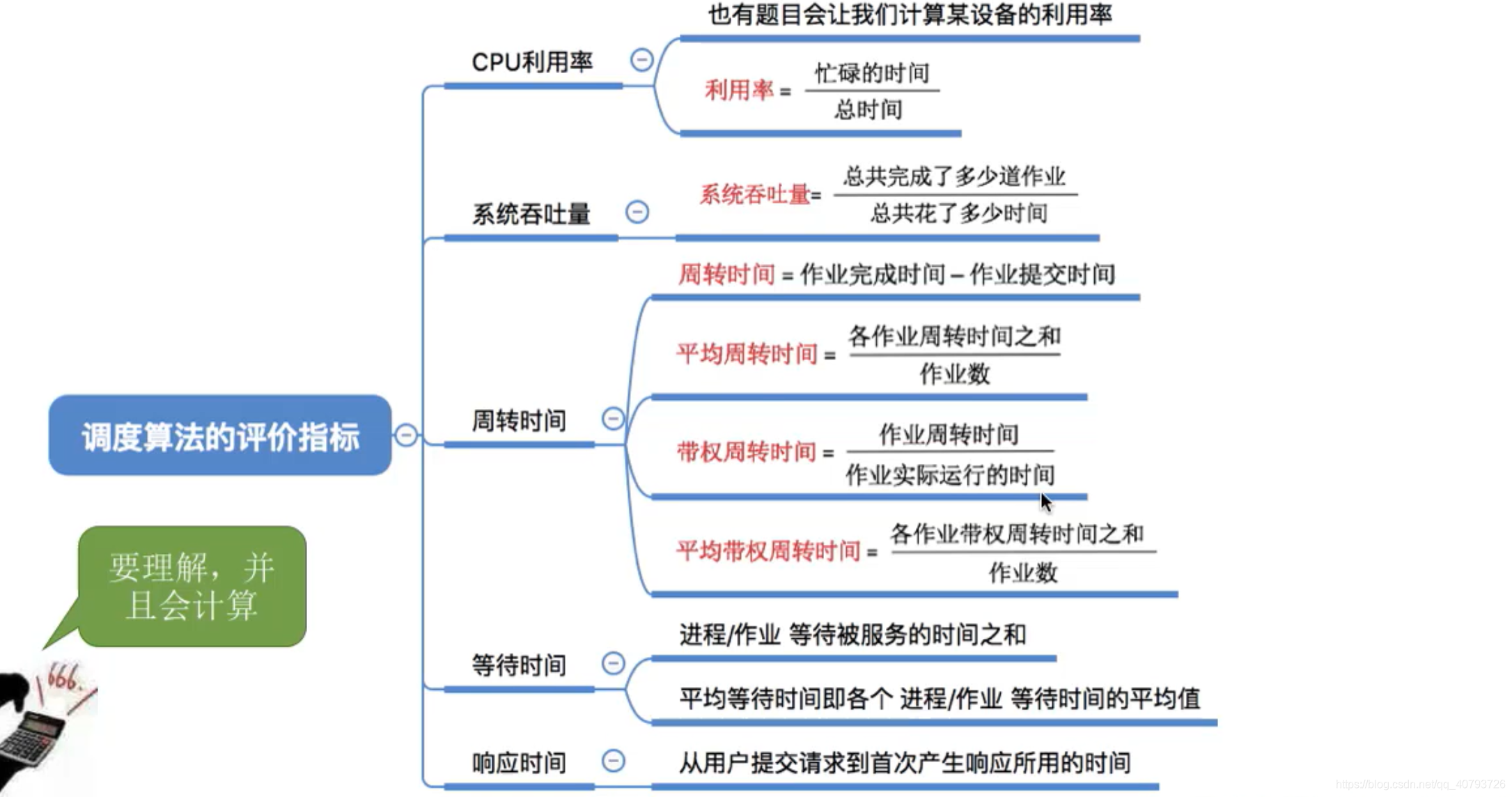
2.7 �����㷨������ָ��
- CPU������:ָCPU��æµ����ʱ��ռ��ʱ��ı�����
- ϵͳ������:��λʱ���������ҵ������,��ʽ:�ܹ�����˶��ٵ���ҵ/�ܹ���ʱ��
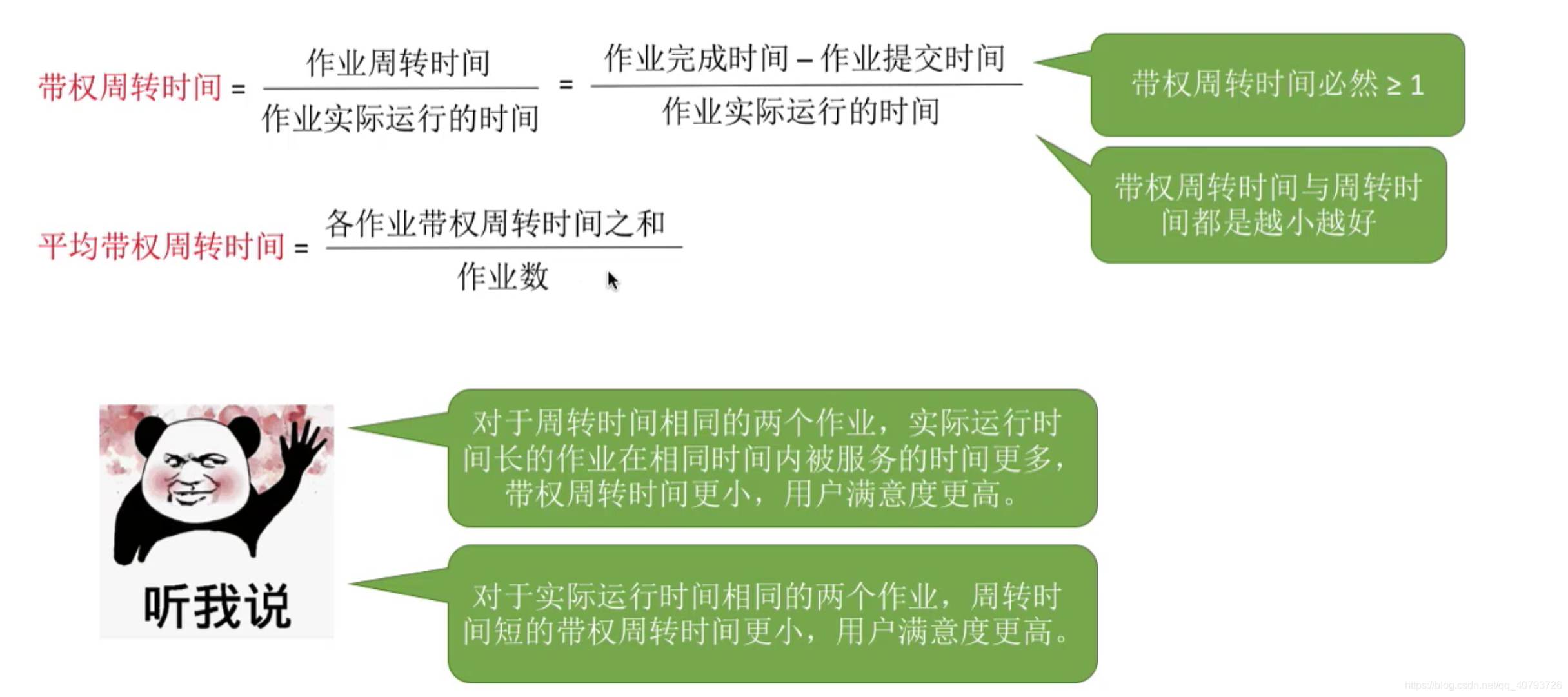
- ��תʱ��:ָ����ҵ���ύ��ϵͳ��ʼ,����ҵ���Ϊֹ�����ʱ��������תʱ��=��ҵ���ʱ��-��ҵ�ύʱ��;ƽ����תʱ�� = ����ҵ��תʱ��֮�� / ��ҵ��
- �ȴ�ʱ��:ָ����/��ҵ���ڵȴ�������״̬ʱ��֮��,�ȴ�ʱ��Խ��,�û������Խ��
- ���ڽ�����˵,�ȴ�ʱ�����ڽ��̽�����ȴ��������ʱ��֮��,�ڵȴ�I/O��ɵ��ڼ��ڱ�����,���Բ�����ȴ�
- ������ҵ��˵,����Ҫ���ǽ������̺�ĵȴ�ʱ��,��Ҫ������ҵ���������еȴ���ʱ��(δ����������)
- ��Ӧʱ��:ָ���û��ύ�����״β�����Ӧ���õ�ʱ��
2.8 �����㷨
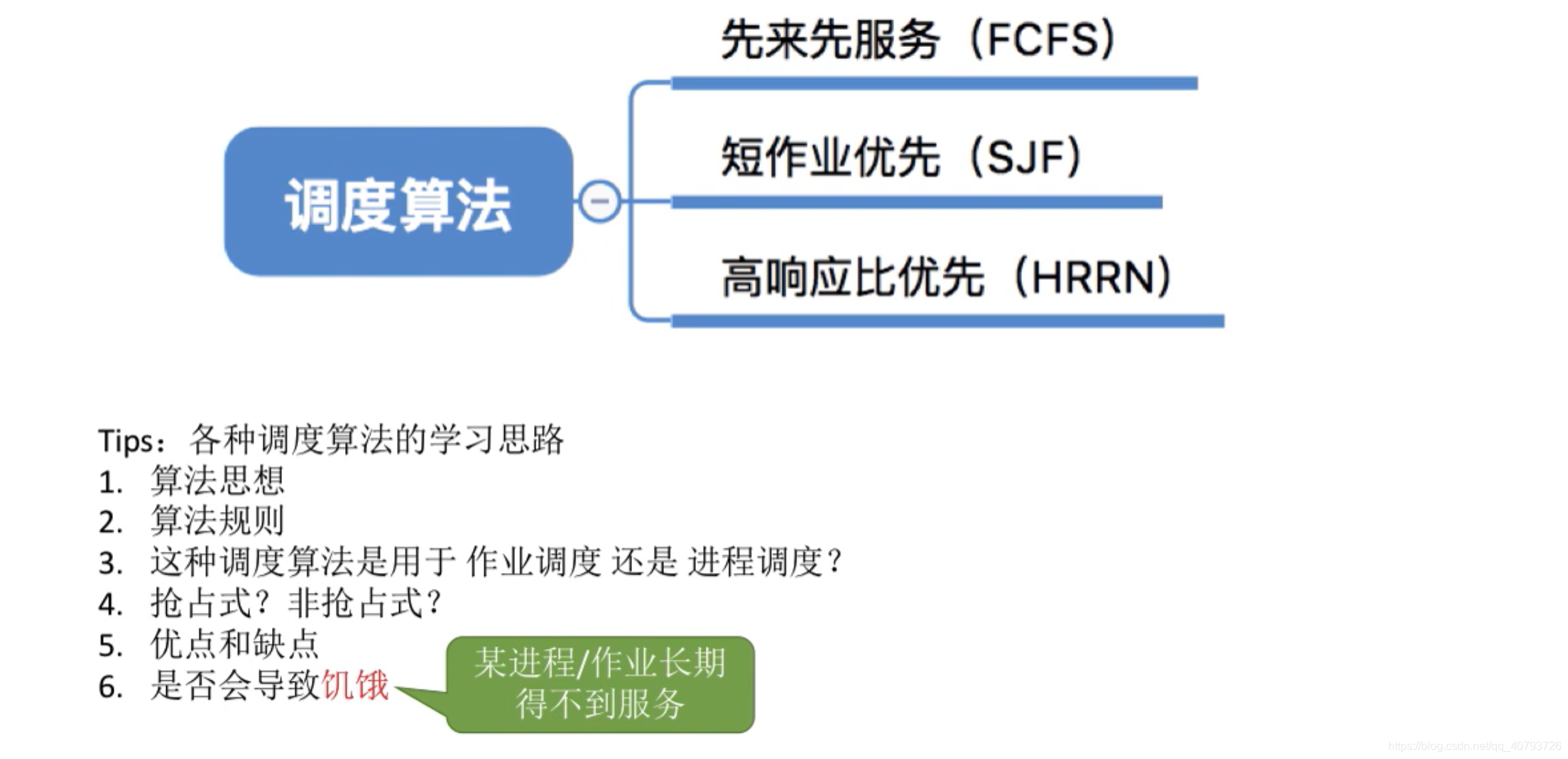
2.8.1 �����ȷ���(FCFS, first come first serve)

2.8.2 ����ҵ����(SJF,shortest Job First)
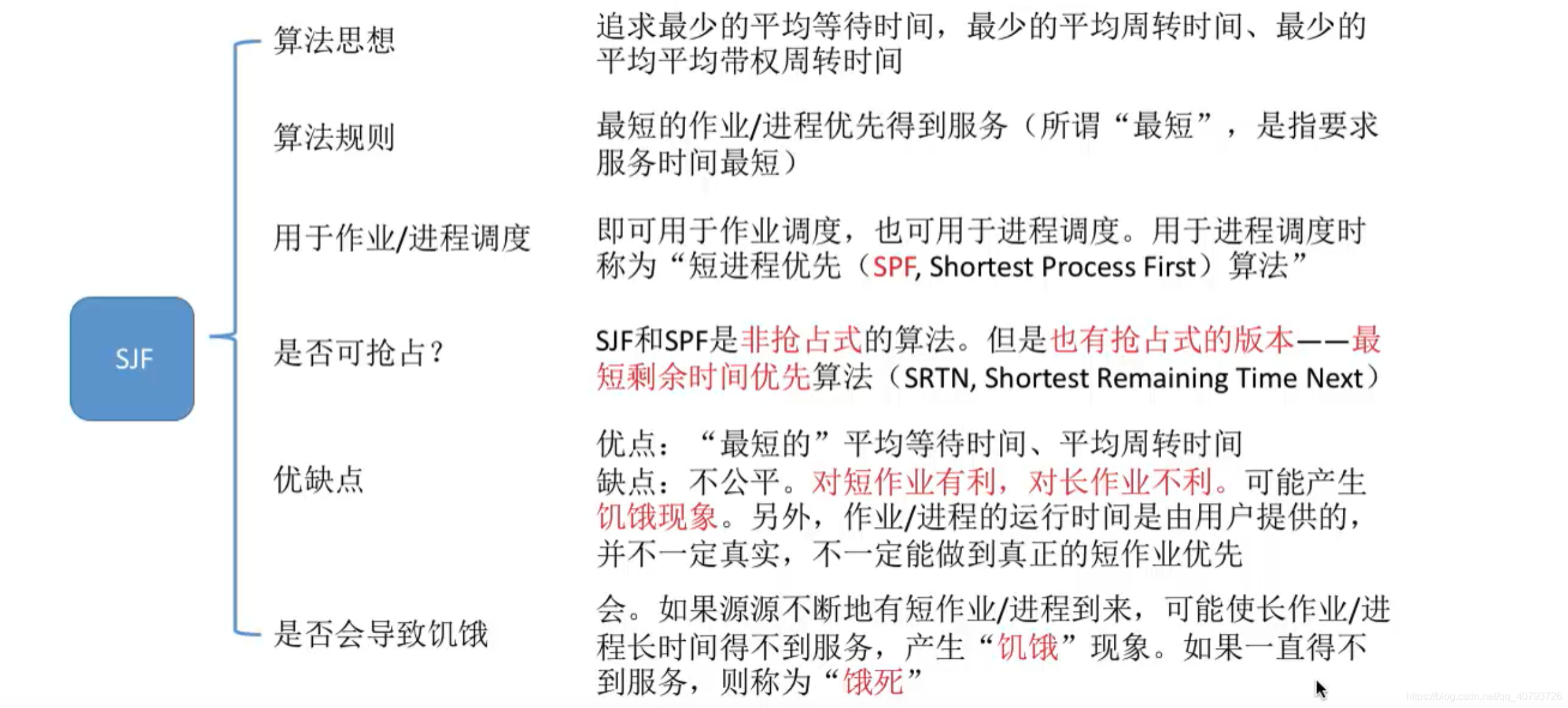
����ҵ����һ��Ĭ���Ƿ���ռʽ��,��ʵ��ռʽ����ƽ���ȴ�ʱ�����
2.8.3 ����Ӧ������(HRRN,highest response ratio next)
����:�����ȷ���ֻ�����˵ȴ�ʱ��,����ҵ����ֻ��������ҵʱ��

��

2.8.4 ʱ��Ƭ��ת(RR,round-robin)
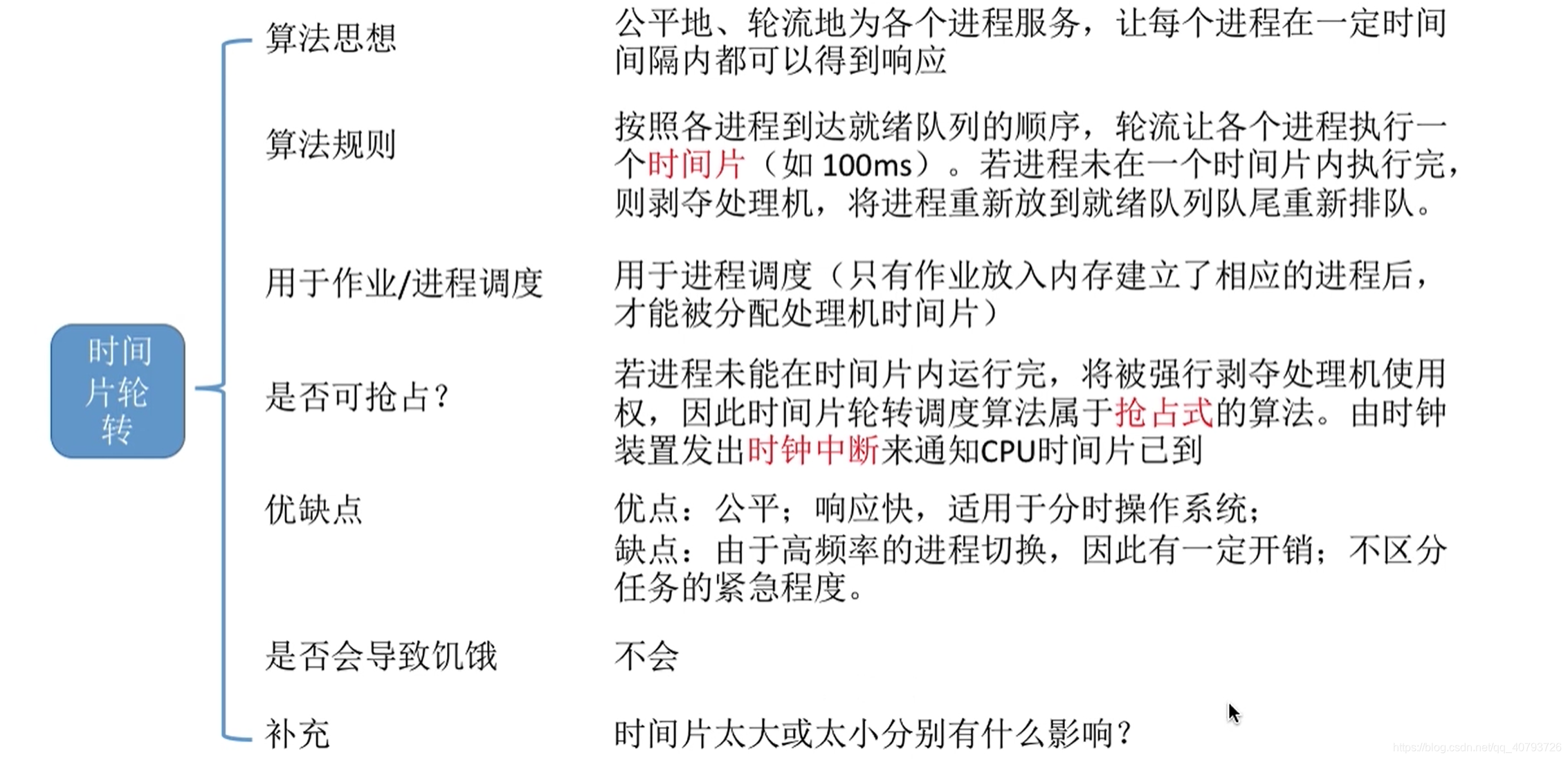
ʱ��Ƭ̫��,ʹ��ÿ����ҵ������������һ��ʱ��Ƭ�����,����˻�Ϊ�����ȷ����㷨
ʱ��Ƭ̫С,ʹ�ý����л�����Ƶ��,�����ӻ����ڽ���ִ�е�ʱ���������
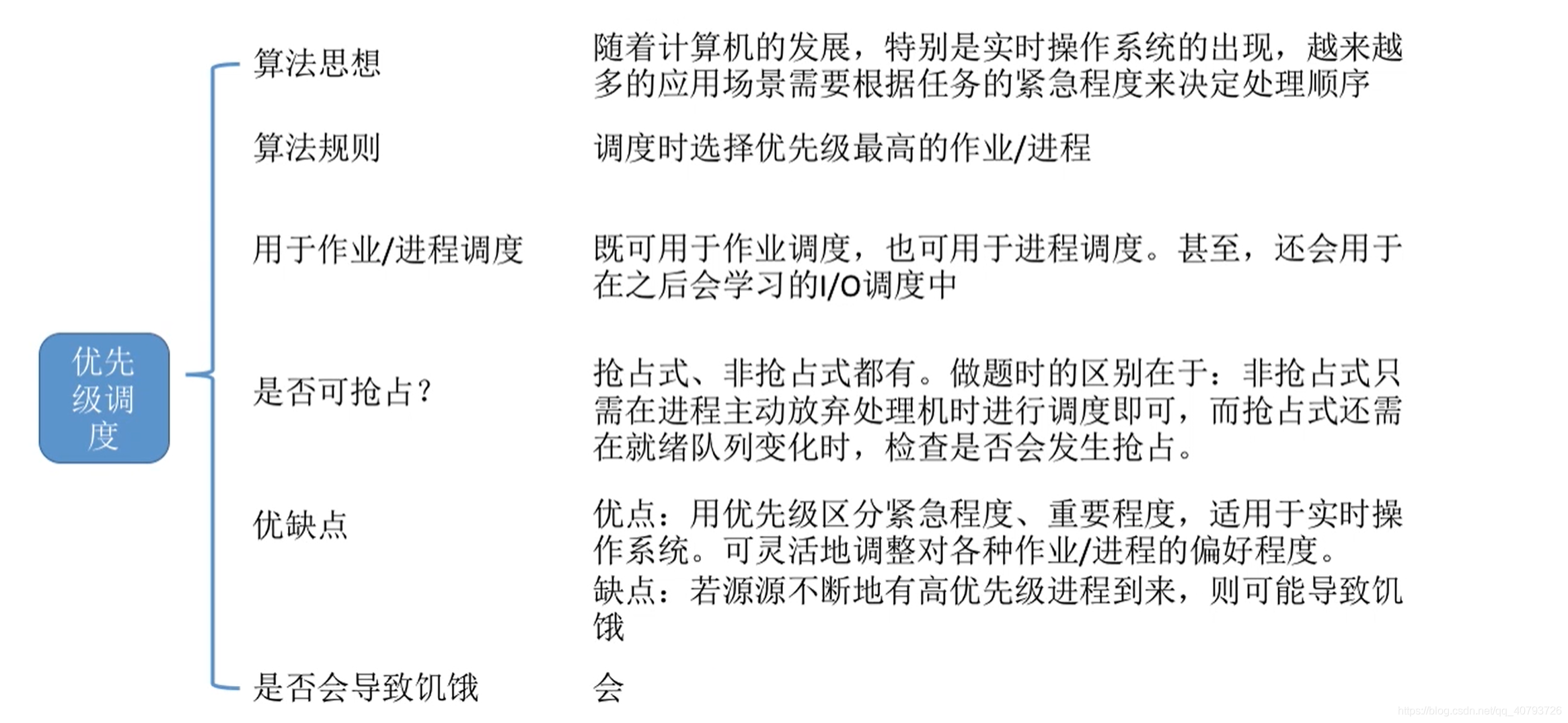
2.8.5 ���ȼ������㷨
2.8.6 �༶�������е����㷨

���ԴԴ�����ж̽���,�����̿��ܻἢ��
��:

2.9 ����ͬ���ͻ���
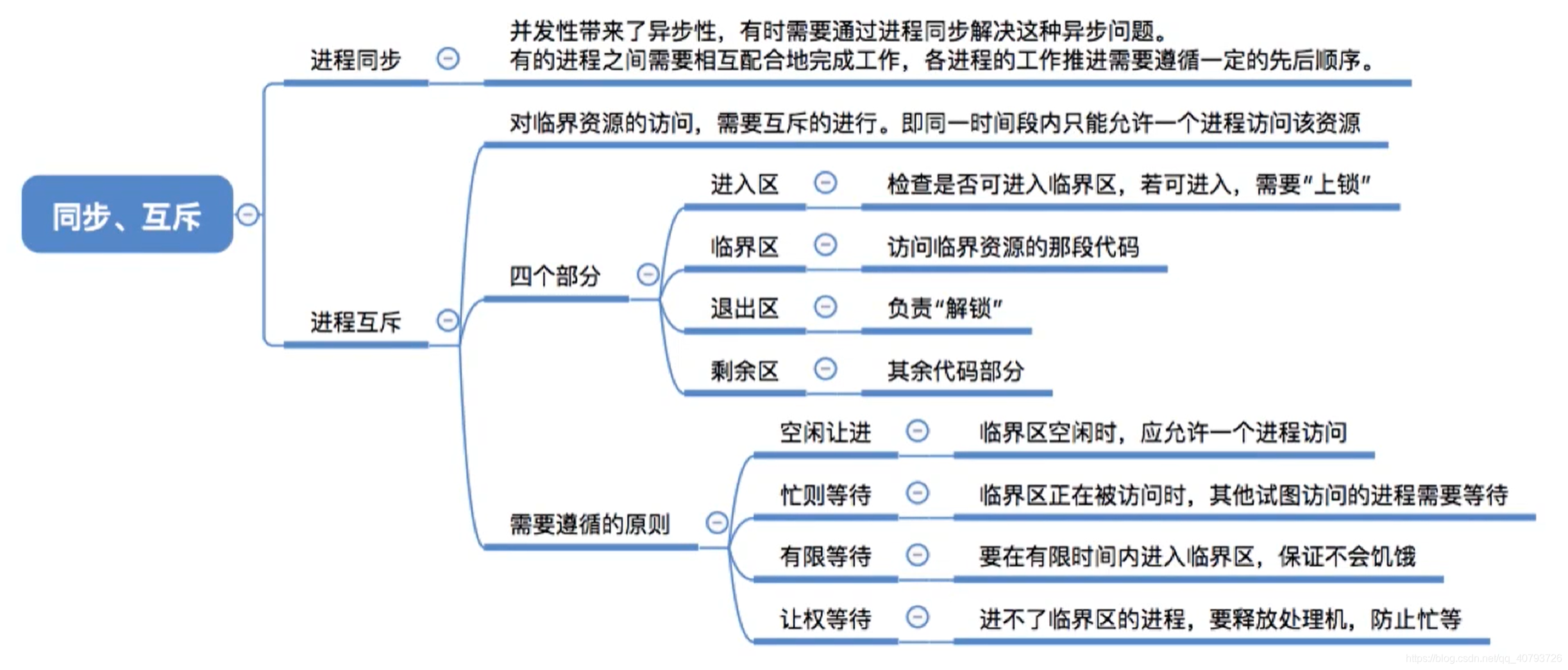
2.9.1 ����ͬ��
֪ʶ��ع�:���̾����첽�Ե�����,�첽����ָ,������ִ�еĽ����Ը��Զ����ġ�����Ԥ֪���ٶ���ǰ�ƽ�
ͬ�����ֱ����Լ��ϵ,����ָΪ���ij�������������������������,��Щ������Ϊ��Ҫ��ijЩλ����Э�����ǵĹ����������������Լ��ϵ�����̼��ֱ����Լ��ϵ����Դ������֮����������
2.9.2 ���̻���
�ٽ���Դ:һ��ʱ�����ֻ����һ������ʹ�õ���Դ
���ٽ���Դ�ķ���,���뻥��ؽ���������,��Ƽ����Լ��ϵ�����̻���ָ��һ�����̷���ij�ٽ���Դʱ,��һ����Ҫ���ʸ��ٽ���Դ�Ľ��̱���ȴ�����ǰ�����ٽ���Դ�Ľ��̷��ʽ���,�ͷŸ���Դ֮��,��һ�����̲���ȥ�����ٽ���Դ��


��:
2.9.3 ���̻��������ʵ�ַ���

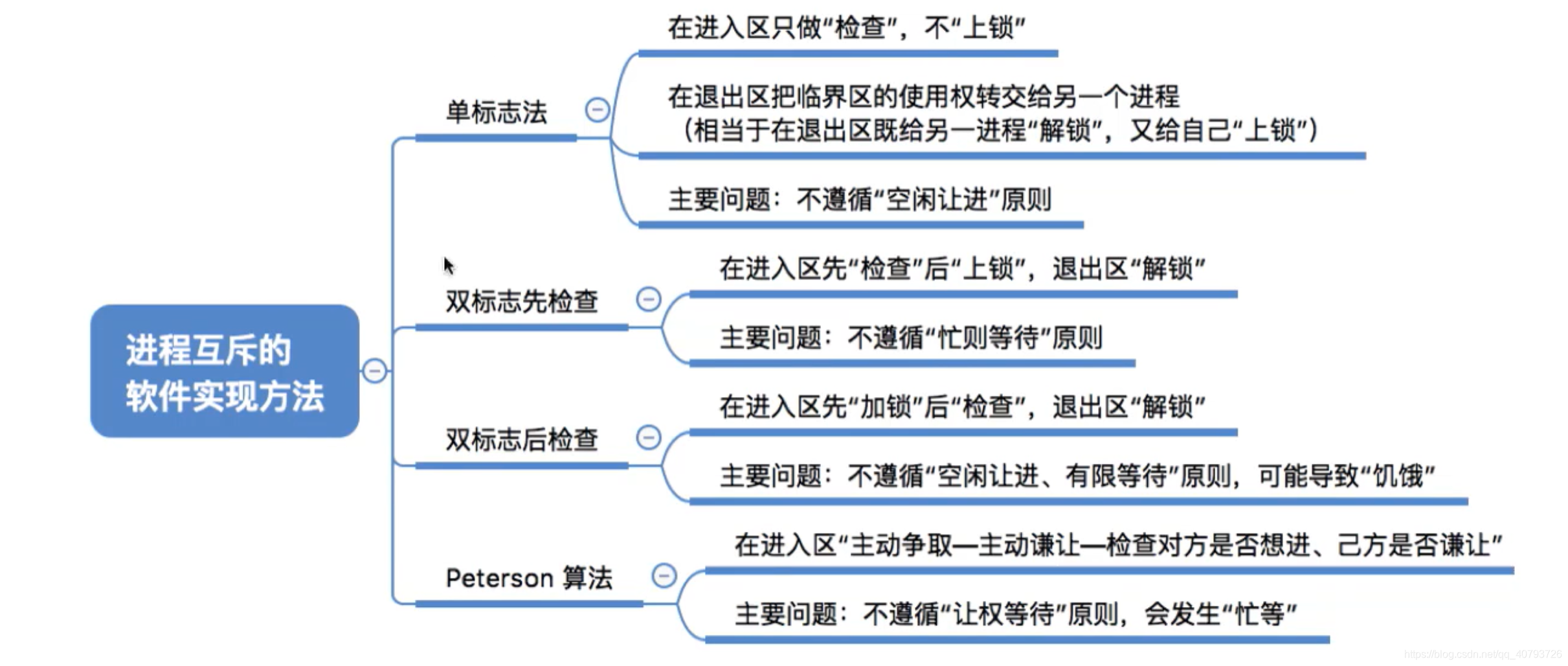
- ����־��:
- �㷨˼��:���������ڷ������ٽ�������ʹ���ٽ�����Ȩ��ת������һ�����̡�Ҳ����˵ÿ�����̽����ٽ�����Ȩ��ֻ�ܱ���һ�����̸���
- ����:���P0�����ٽ�������һֱ������,�˿�P1�ֲ����������ٽ�����ô�ٽ����ͻᱻ����,Υ���ˡ������ý�����ԭ��
- ˫��־�ȼ�鷨
- ����һ������������flag[],�����и���Ԫ��������Ǹ�����������ٽ�������Ը,
- ����:�������ġ���顱(������������Ƿ�������ٽ���)�͡�������(��������������������ٽ���)������������һ ���dzɵ�,����顰��͡�������ǰ���ܷ��������л�,Υ���ˡ�æ��ȴ�����ԭ��
- ˫��־���鷨
- �㷨˼��:����������
- ����:���ȼ�鷨һ������һ���dzɵ�,���ܶ����ܽ����ٽ���,����ˡ�æ��ȴ���,Υ���ˡ������ý����͡����ȴ���ԭ��,�����̿��ܲ���������������
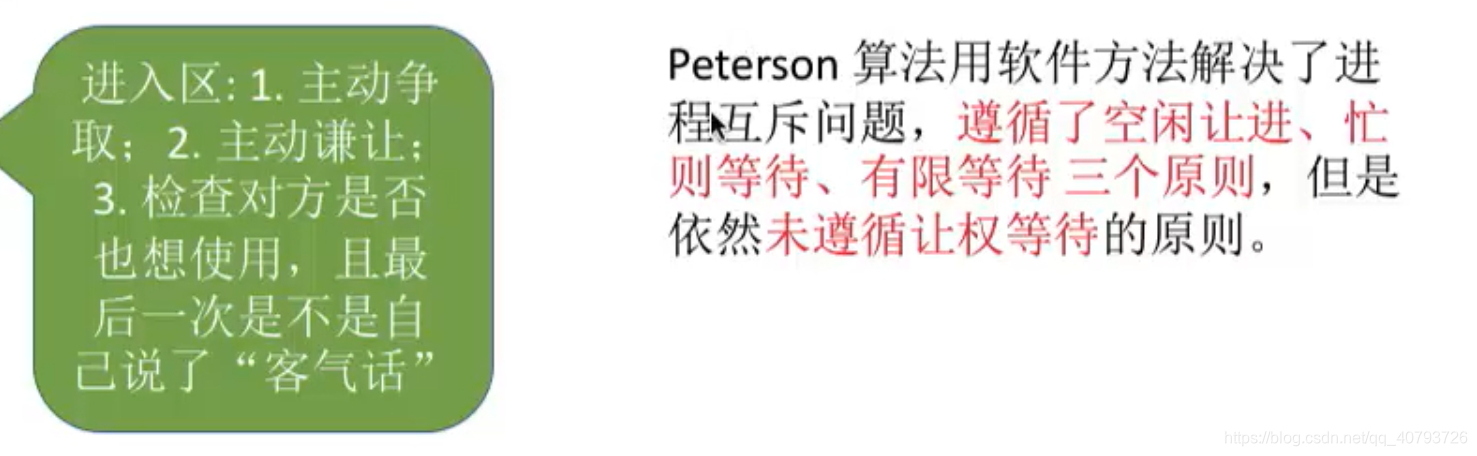
- Peterson�㷨
- �㷨˼��:���˫��˭Ҳ����˭,���ԡ��������桰˼��,����flag[]�����ʾ��Ը����,turn��ʾ�������ĸ����̽����ٽ���
2.9.4 ��
2.9.4 ���̻����Ӳ��ʵ�ַ���
- �ж����η���
- ���á���/���ж�ָ�ʵ��(��ԭ���ʵ��˼����ͬ,����ij���̿�ʼ�����ٽ�������������Ϊֹ�����������ж�,Ҳ�Ͳ��ܷ��������л�,���Ҳ�����ܷ�������ͬʱ�����ٽ��������)�����жϺ�������ǰ���̱��ж�,Ҳ��Ȼ���ᷢ�������л�
- ��Ч,�������ڶദ����;ֻ�����ڲ���ϵͳ�ں˽���,���������û�����(Σ��)
- TestAndSet ָ��
- ��Ӳ��ʵ�ֵ�,ִ�й��̲������ж�,������顰�͡���������Ӳ���ķ�ʽ�����һ���dzɵ�ԭ�Ӳ���
- �����ڶദ����,�����㡱��Ȩ�ȴ���
- Swapָ��
- ��Ӳ��ʵ�ֵ�,ִ�й��̲������ж�
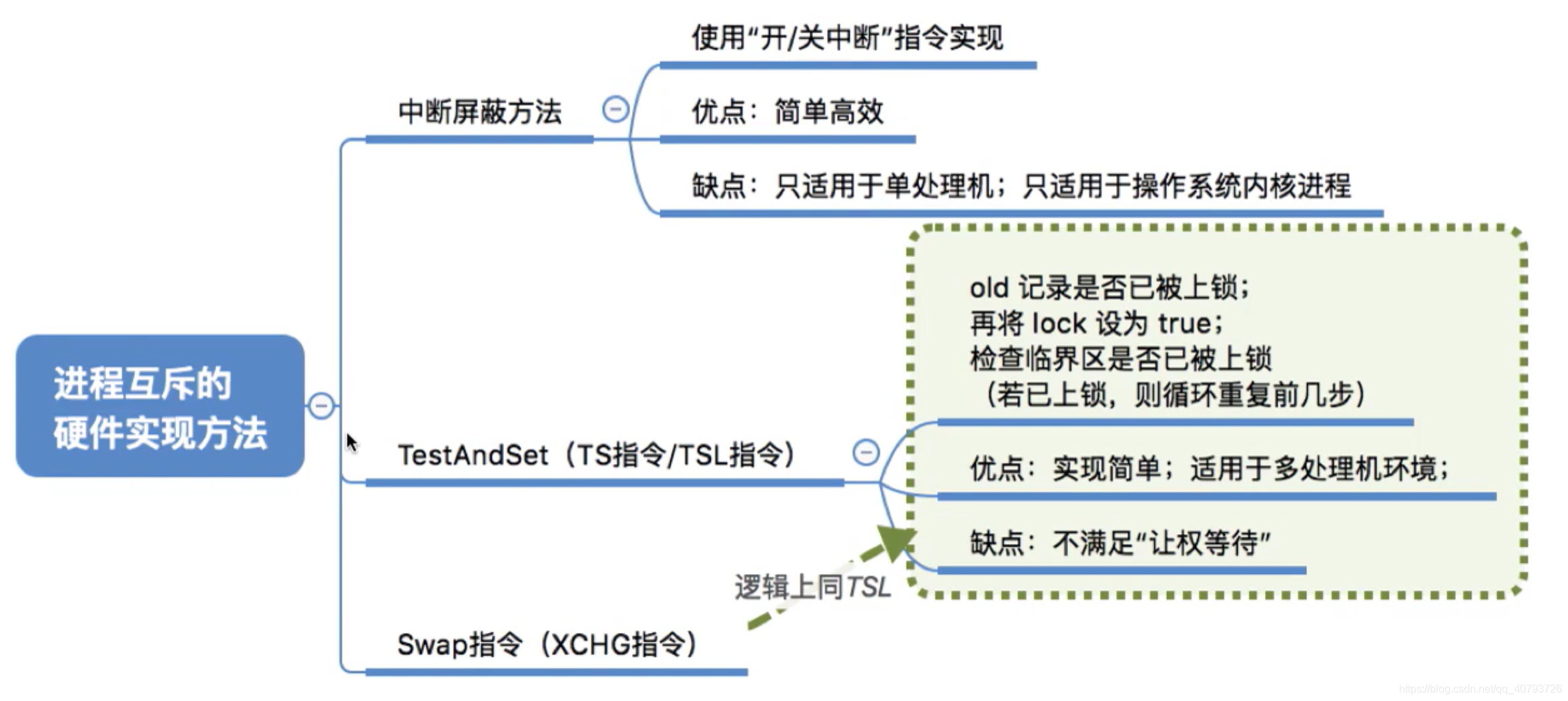
- ��Ӳ��ʵ�ֵ�,ִ�й��̲������ж�
2.10 �ź�������
�û����̿���ͨ��ʹ�ò���ϵͳ�ṩ�ĨC��ԭ�������ź������в���,�Ӷ��ܷ����ʵ���˽��̻��⡢����ͬ����
�ź���:����һ������,��ʾϵͳ��ij����Դ������
һ��ԭ��:wait(s)��signal(s),ԭ����һ-������ij����,��ִ��ֻ��һ���dz�,���ɱ��ж�
�ź���:
- �����ͱ������ź���:��ʾϵͳ��ij����Դ������,���ֲ���:��ʼ����P����(wait)��V����(signal)
- ��������:�����㡱��Ȩ�ȴ���,������æ�ȡ�
- ��¼���ź���:�ü�¼�����ݽṹ��ʾ���ź���,��¼ʣ����Դ���͵ȴ�����,����Դʱ������ȴ����еĶ�ͷ����
- P����:��������һ����λ�ĸ�����Դ,ʣ����Դ��-1
- V����:��ϵͳ��Դ���ͷ�,ʣ����Դ��+1

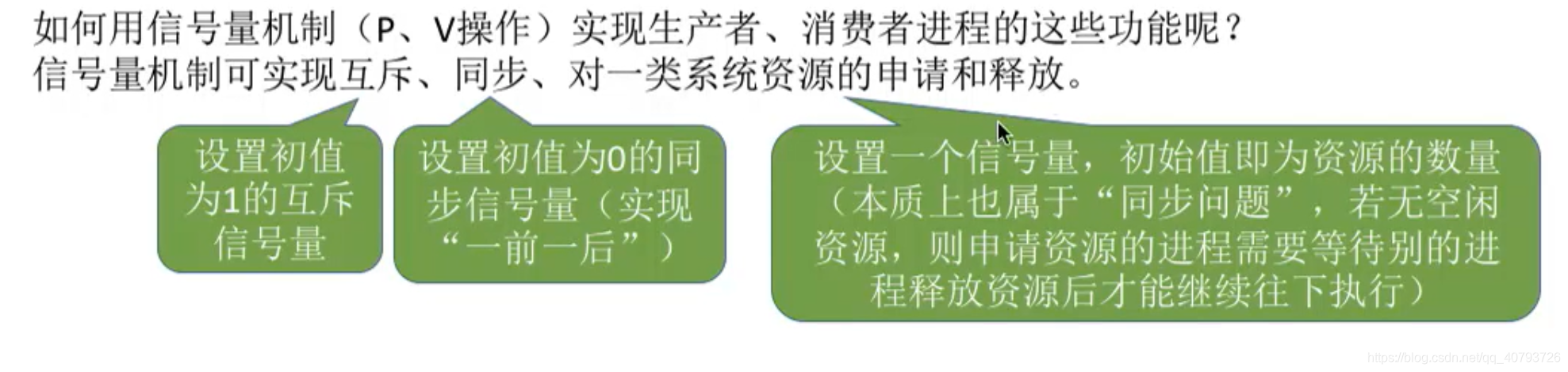
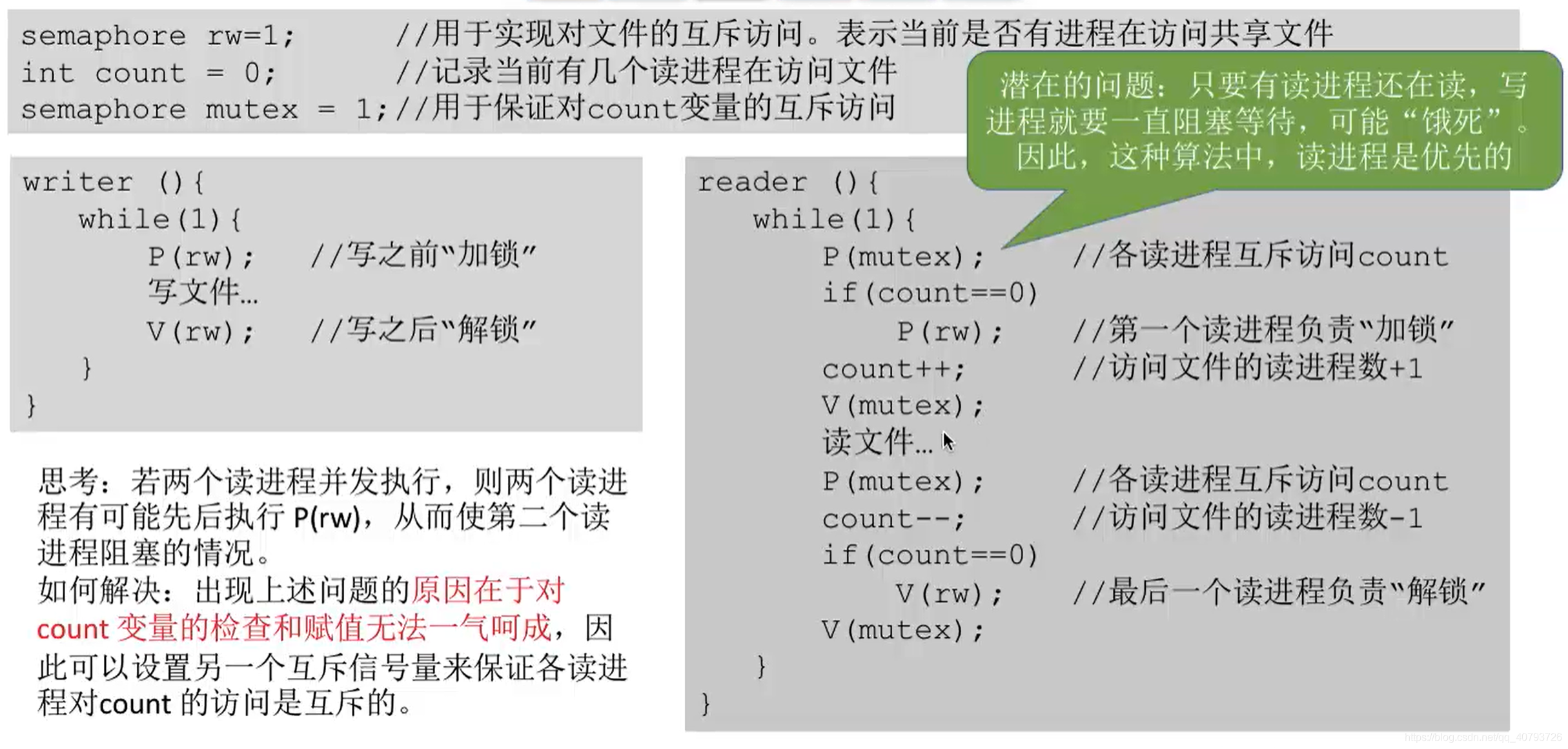
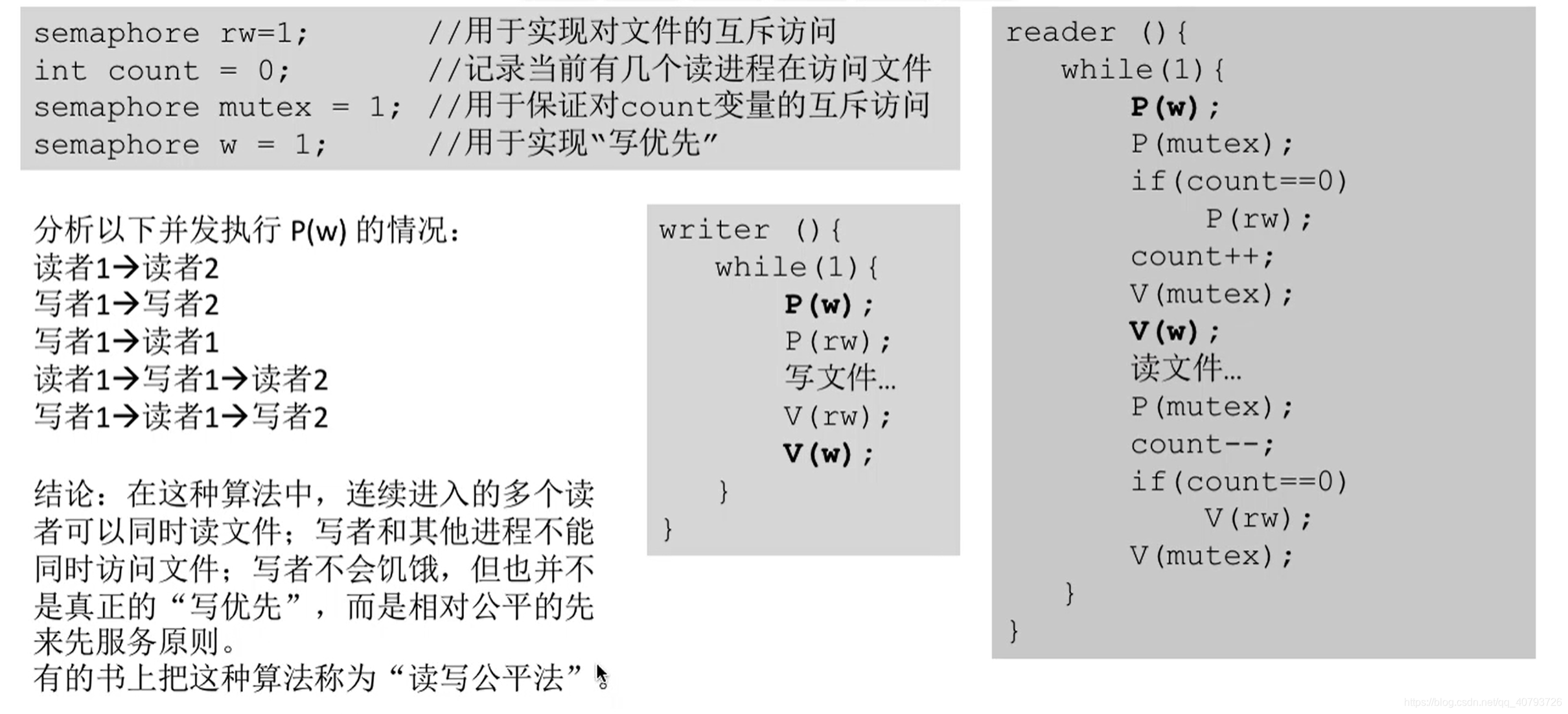
2.11 �ź�������ʵ�ֽ��̻��⡢ͬ����ǰ����ϵ
2.11.1 ʵ�ֽ��̻���
- ���û����ź���mutex,��ֵΪ1
- ���ٽ���֮ǰִ��P(mutex),ʹ���ٽ���Դǰ��Ҫ����
- ���ٽ���֮��ִ��V(mutex),ʹ���ٽ���Դ����Ҫ����
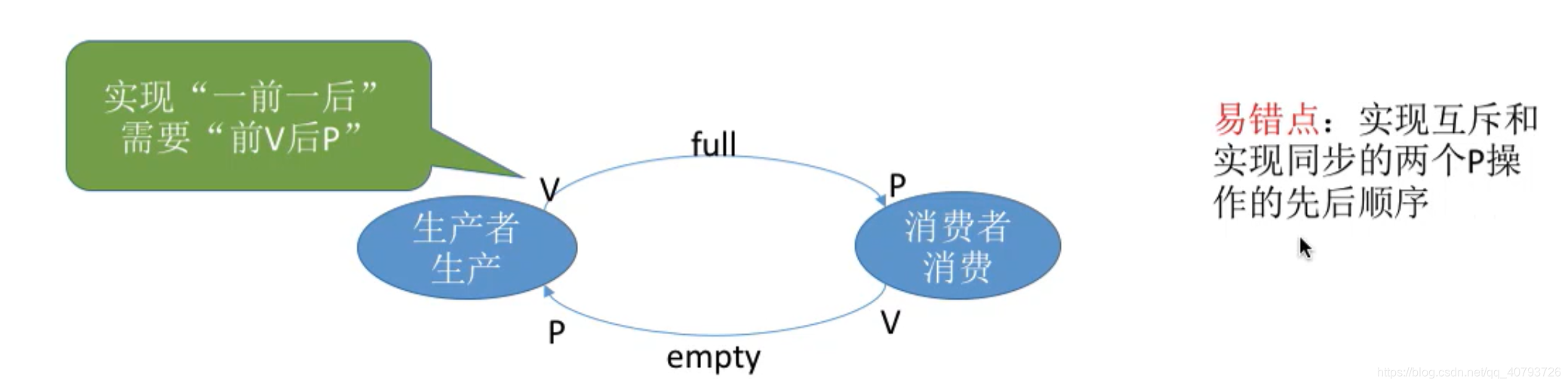
2.11.2 ʵ�ֽ���ͬ��
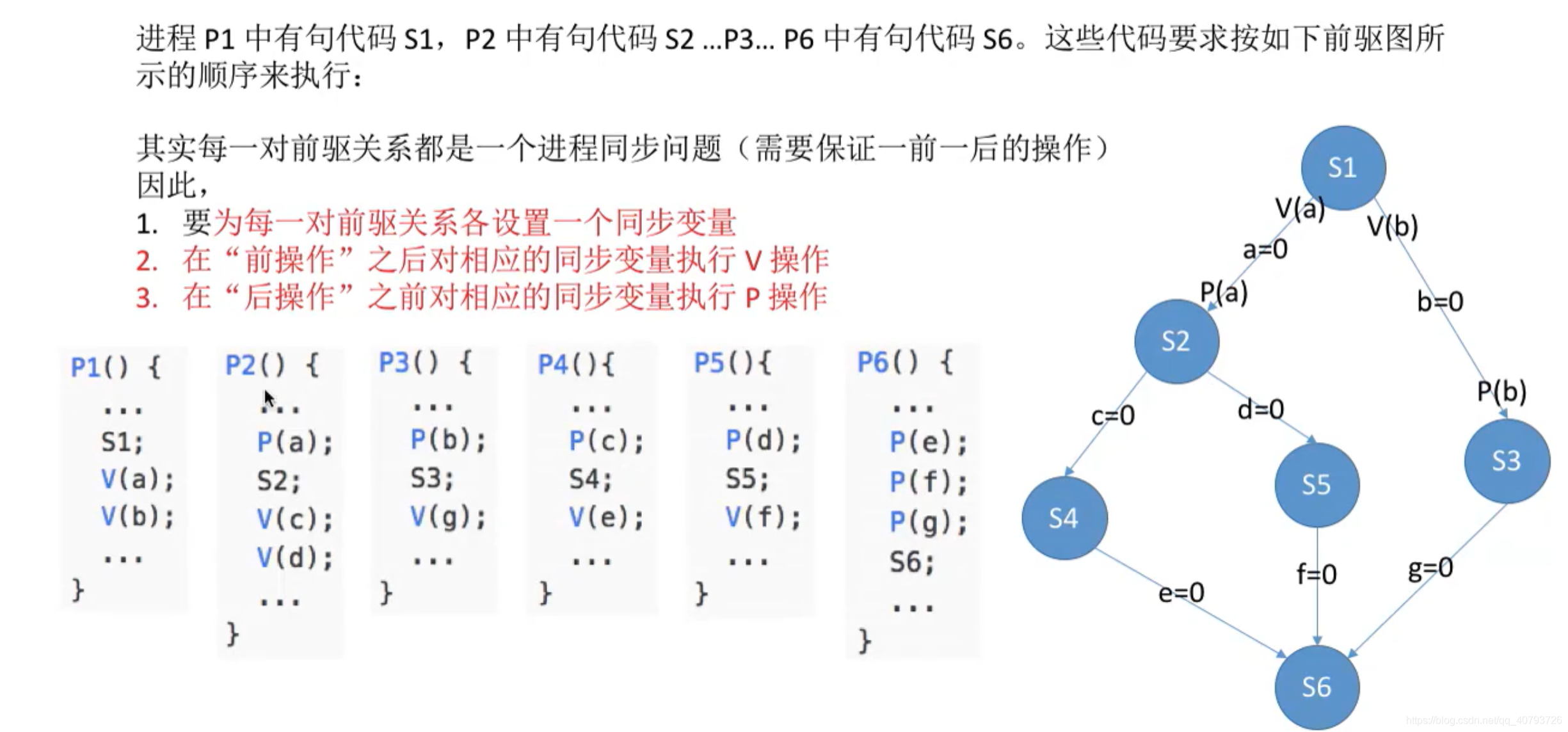
����ͬ��:Ҫ�ø��������̰�Ҫ��������ƽ����������DZ��뱣֤��һǰһ��ͬ����ϵ
- ����ͬ���ź���S,��ʼΪ0
- �ڡ�ǰ������֮��ִ��V(S)
- �ڡ��������֮ǰִ��P(S)
2.11.3 ʵ��ǰ����ϵ

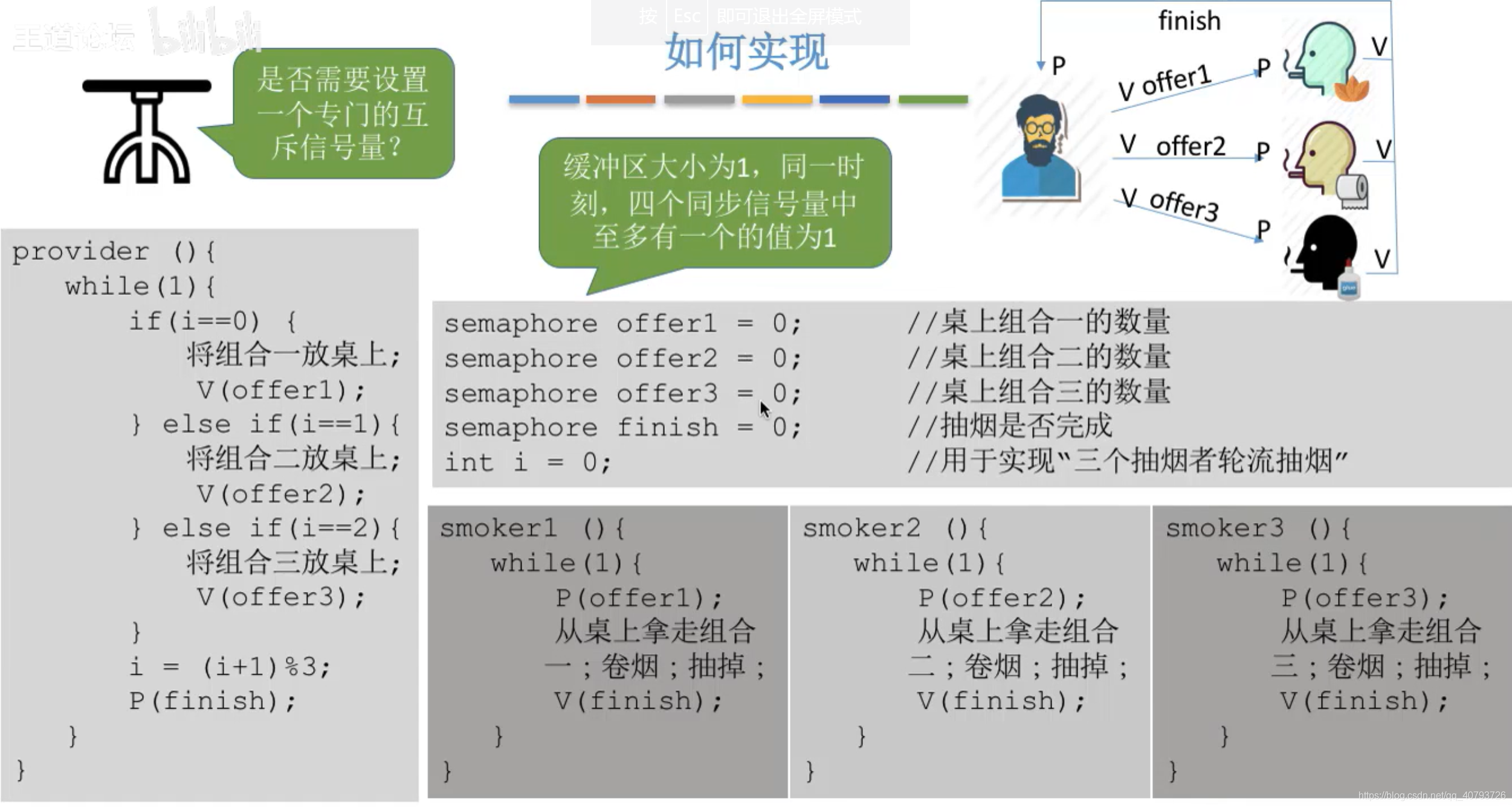
2.12 ������ - ����������

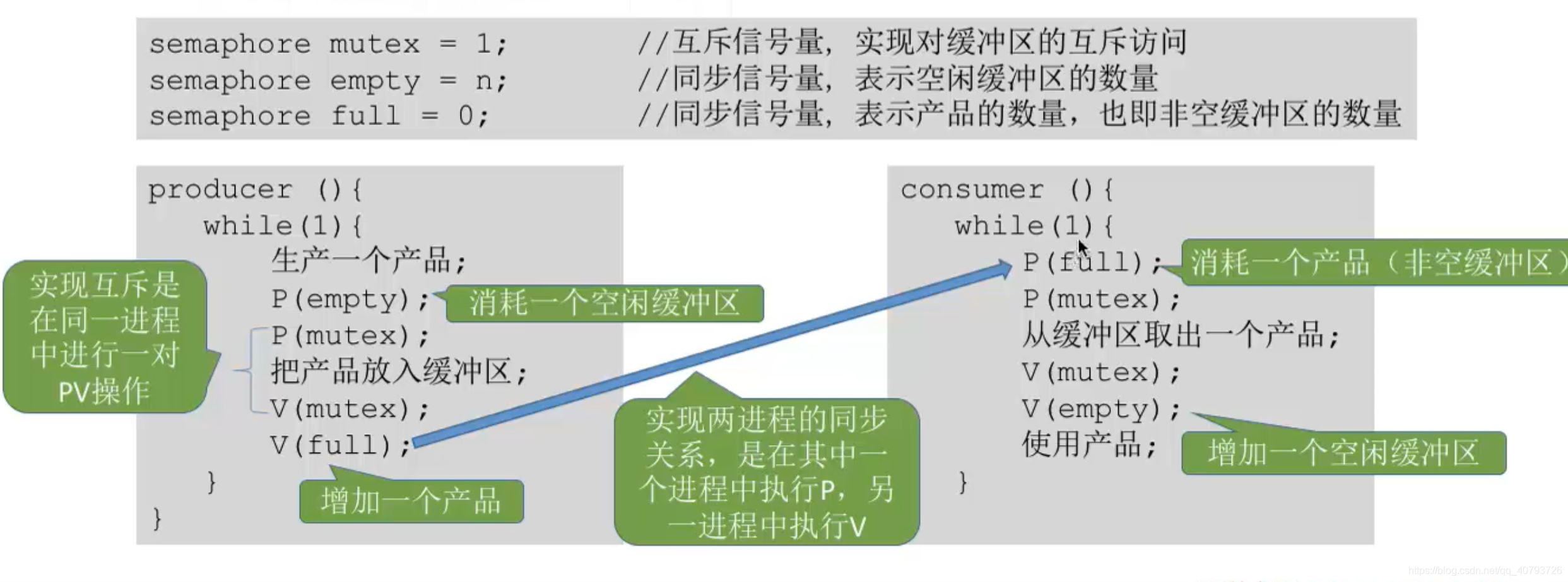
ʵ�ֻ����P����һ-��Ҫ��ʵ��ͬ����P����֮���߳��������ߺ������߳��֡�������,����V����˳����Խ���
�ܽ�:
������-����������һ�Ի��⡢����ͬ����ϵ
- ��������-����������
�������������Ϊ2,�������û������,������ĸ����ͬʱ��������,ͬ����ϵ��Ϊ:���ӱ�ըC>����ˮ��
- ����������
- ����-�����
- ��ѧ�ҽ�������
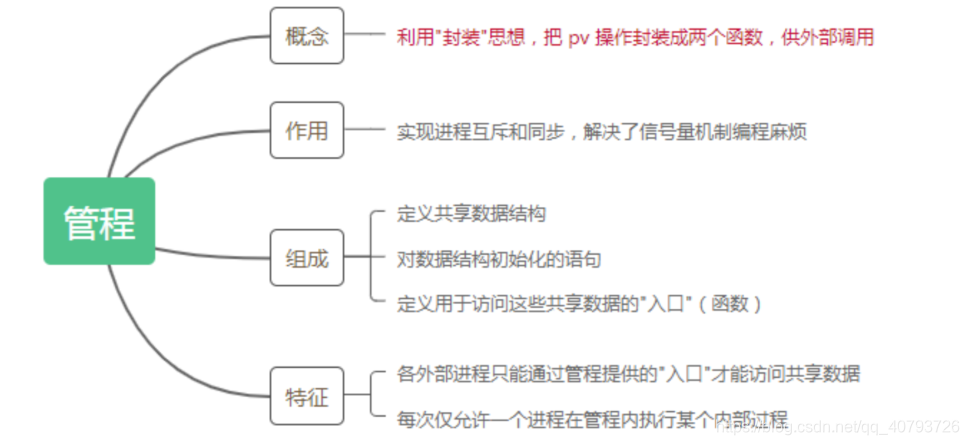
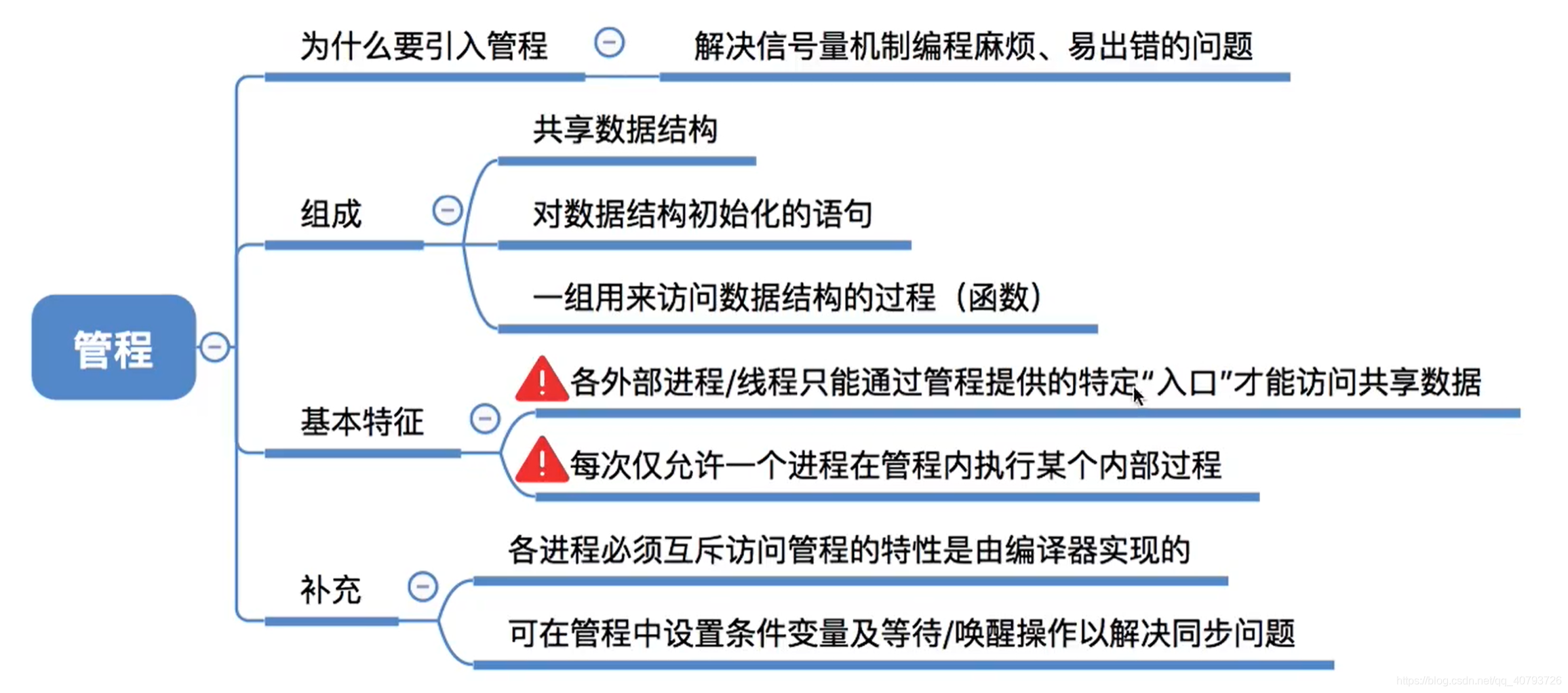
2.13 �ܳ�

2.13.1 ΪʲôҪ����ܳ�
�ź������ƴ��ڵ�����:��д�������ѡ��׳���,�ܲ������һ�ֻ���,�ó���Աд����ʱ����Ҫ�ٹ�
ע���ӵ�PV����,��д�����������?
�ܳ�:һ�ָ���ͬ������
2.13.2 �̵ܳĶ���ͻ�������
2.14 ����

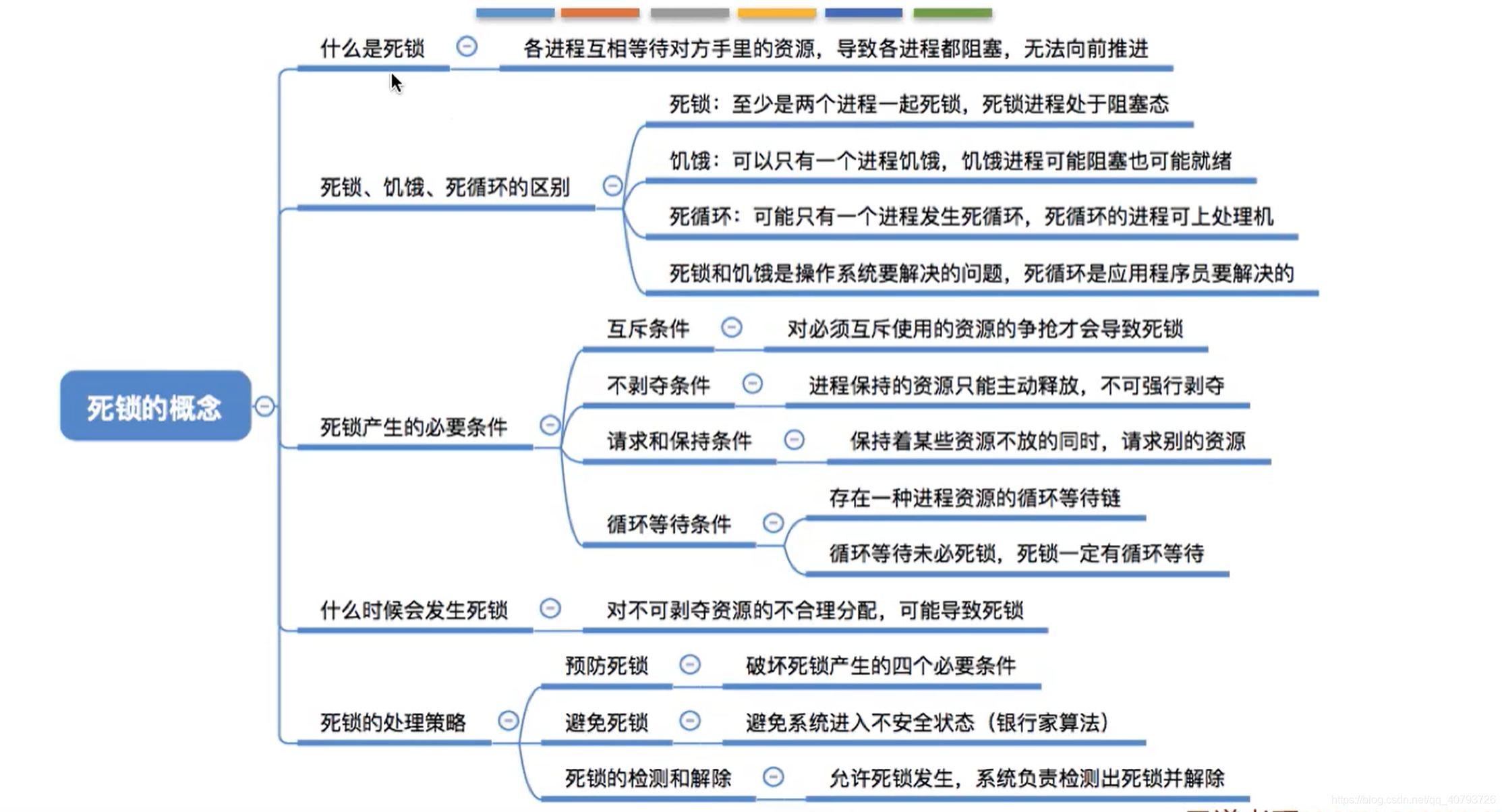
2.14.1 ʲô������
�ڲ���������,��������������Դ����ɵ�һ�ֻ���ȴ��Է��������Դ,���¸����̶�����,������ǰ�ƽ�������,���ǡ�����������������������������,��Щ���̶�������ǰ�ƽ���
2.14.2 ��������������ѭ��������
- ����:�����̻���ȴ��Է��������Դ,���¸����̶�����,����ǰ�ƽ�������
- ����:���ڳ��ڵò�����Ҫ����Դ,ij��������ǰ�ƽ���������:�ڶ̽�������(SPF) �㷨��,����ԴԴ���ϵĶ̽��̵���,���̽�һֱ�ò���������,�Ӷ����������̡�������
- ��ѭ��:ij����ִ�й�����һֱ������ij��ѭ����������ʱ����Ϊ������bug���µ�,��ʱ�dz���Ա������Ƶġ�

2.14.3 ���������ı�Ҫ����
- ��������:ֻ�жԱ��뻥��ʹ�õ���Դ�������Żᵼ������
- ����������: ��������õ���Դ��δʹ����֮ǰ,��������������ǿ�ж���,ֻ�������ͷš�
- ����ͱ�������:�����Ѿ�����������һ����Դ,����������µ���Դ����,������Դ�ֱ���������ռ��,��ʱ������̱�����,���ֶ��Լ����е���Դ���ֲ��š�
- ѭ���ȴ�����:����һ�ֽ�����Դ��ѭ���ȴ���,���е�ÿһ�������ѻ�õ���Դͬʱ����һ������������
ע��!��������ʱһ����ѭ���ȴ�,���Ƿ���ѭ���ȴ�ʱδ������(ѭ���ȴ��������ı�Ҫ���������)
���ͬ����Դ������1,��ʹ��ѭ���ȴ�,Ҳδ�ط��������������ϵͳ��ÿ����Դ��ֻ��һ��,��ѭ���ȴ����������ij�ֱ�Ҫ�����ˡ�
2.14.4 ʲôʱ��ᷢ������
- �����̶Բ��ɰ������Դ(���ӡ��)�ľ���������������
- ������ͷ���Դ��˳��
- �ź�����ʹ�ò���Ҳ���������
��֮,�Բ��ɰ�����Դ�IJ���������,���ܵ���������
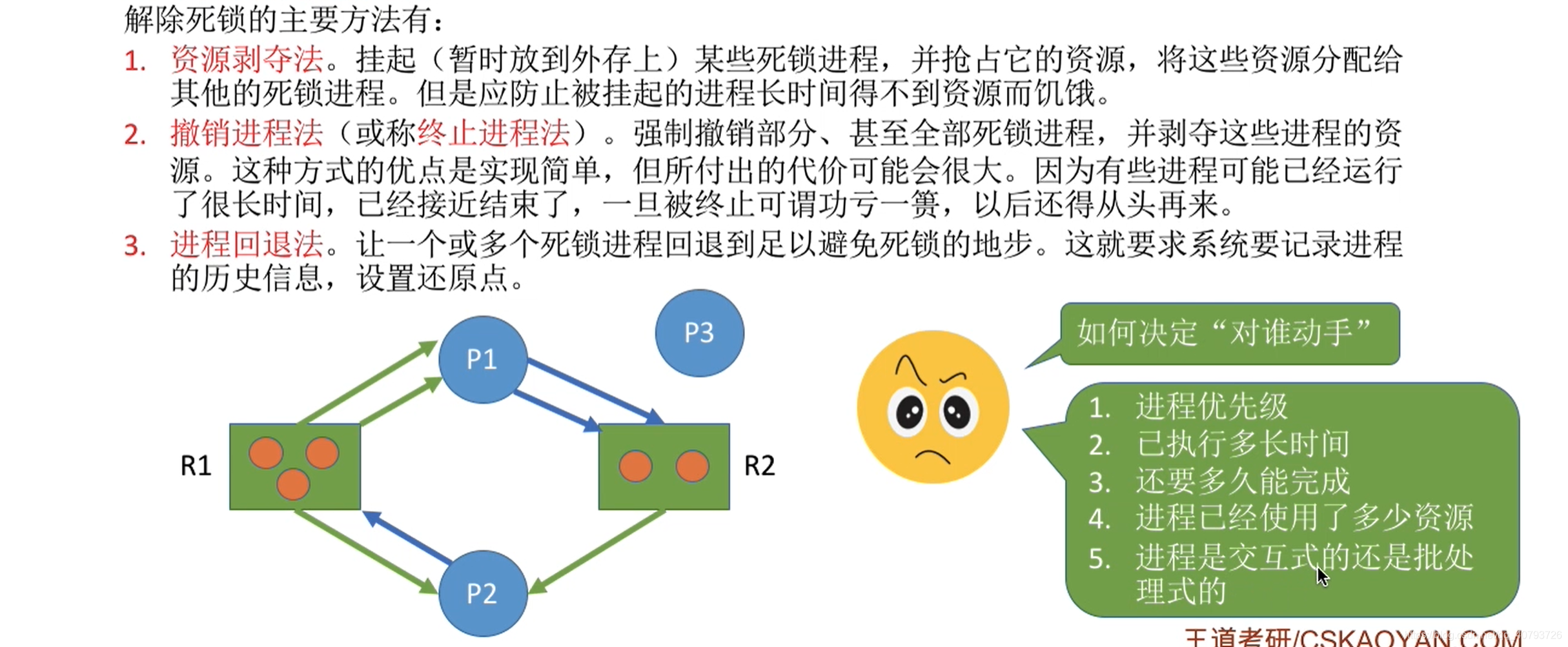
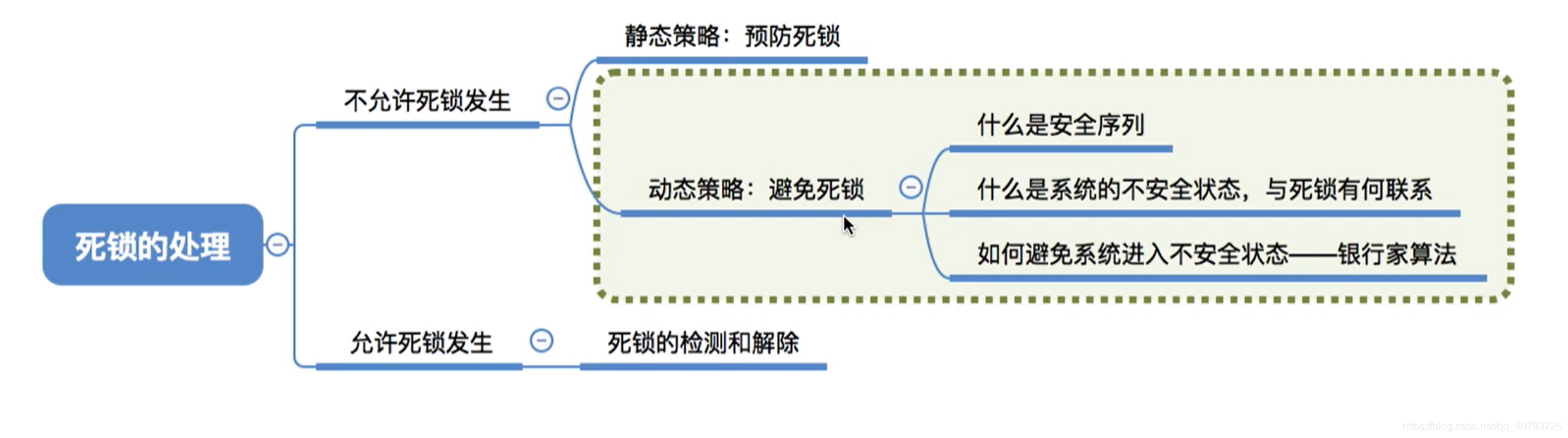
2.14.5 �����Ĵ�������
- Ԥ���������ƻ������������ĸ���Ҫ�����е�һ������
- ������������ij�ַ�����ֹϵͳ���벻��ȫ״̬,�Ӷ���������(���м��㷨)
- �����ļ��ͽ�������������ķ���,��������ϵͳ�Ḻ����������ķ���,Ȼ���ȡij�ִ�
ʩ���������
2.15 �����Ĵ�������
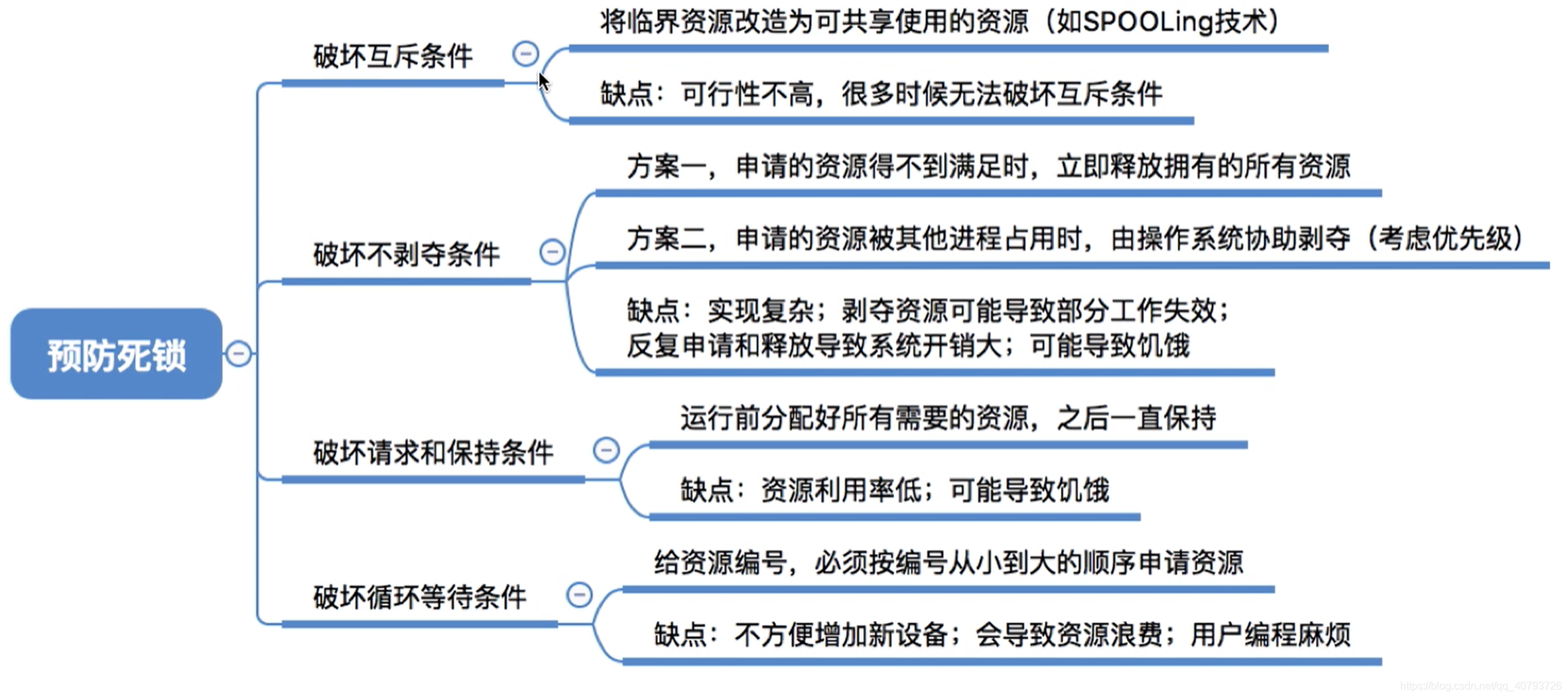
2.15.1 Ԥ������
- �ƻ���������:�����ֻ�ܻ���ʹ�õ���Դ����Ϊ��������ʹ��,��ϵͳ�����������״̬,����SPOOLing����,����ռ�豸�����ϸ���ɹ����豸
- ȱ��:�����ƻ��������,���÷�Χ����
- �ƻ�����������:
- ����һ:��ij�����������µ���Դ�ò�������ʱ,�����������ͷű��ֵ�������Դ,���Ժ���Ҫ��������
- ������:����ϵͳЭ������Ҫ����Դǿ�а���
- ȱ��:
- ʵ�ָ���
- �ͷ��ѻ�õ���Դ�������ǰһ�ι�����ʧЧ,ֻ�������ױ�����ָ�״̬����Դ
- ������������ͷ���Դ������ϵͳ����,����ϵͳ������
- ���÷���һ,���һֱ�����ò�����Դ�����,���½��̼���
- �ƻ�����ͱ�������:
- ���Բ��þ�̬���䷽��,������������ǰ-.��������������Ҫ��ȫ����Դ,��������Դδ����ǰ,������Ͷ�����С�һ��Ͷ�����к�,��Щ��Դ��һ ֱ��������,�ý��̾Ͳ������������κ���Դ�ˡ�
- ȱ��:
- ����ʱ��̵Ľ���һֱ����������Դ,������ص���Դ�˷�,��Դ�����ʼ���
- ����ijЩ���̼���,����A������Ҫ��Դ1,B������Ҫ��Դ2,C������Ҫ��Դ1��2,ϵͳ����ԴԴ���ϵ�A��B�����ʱ,����C���̼���
- �ƻ�ѭ���ȴ�����:
- �ɲ���˳����Դ���䷨�����ȸ�ϵͳ�е���Դ���,�涨ÿ�����̱��밴��ŵ�����˳��������Դ,ͬ����Դ(�������ͬ����Դ)һ�������ꡣ
ԭ������:һ������ֻ����ռ��С��ŵ���Դʱ,�����ʸ���������ŵ���Դ�����˹���,�ѳ��д�����Դ�Ľ��̲���������ػ�������С��ŵ���Դ,�Ӷ��Ͳ������ѭ���ȴ����������κ�һ��ʱ��,����һ������ӵ�е���Դ���������,�������������֮�����Դ��Ȼ��ͨ���衣���,�����ܳ������н��̶���������������
ȱ��:
�������豸��Ҫ���·������еر��
����ʵ��ʹ����Դ��˳����ܺͱ�ŵ�����˳��һ��,������Դ�˷�
���밴�涨����������Դ,�û�����鷳
2.15.2 ��������
-
��ȫ���С�����ȫ״̬����������ϵ
- ��ȫ����,����ָ���ϵͳ�����������з�����Դ,��ÿ�����̶���˳����ɡ�ֻҪ���ҳ�һ��
��ȫ����,ϵͳ���ǰ�ȫ״̬����Ȼ,��ȫ���п����ж���� - ����ȫ״̬,��������Դ֮��,ϵͳ���Ҳ����κ�һ����ȫ����,���벻��ȫ״̬,��ζ��֮��������н��̶���˳��ִ��,��������н�����ǰ�黹һ������Դ,ϵͳ�п������»ص���ȫ״̬
- ���ϵͳ���ڰ�ȫ״̬,��һ�����ᷢ�����������ϵͳ���벻��ȫ״̬,�Ϳ��ܷ�������(���ڲ���ȫ״̬δ�ؾ��Ƿ���������,����������ʱһ�����ڲ���ȫ״̬)
- ��ȫ����,����ָ���ϵͳ�����������з�����Դ,��ÿ�����̶���˳����ɡ�ֻҪ���ҳ�һ��
-
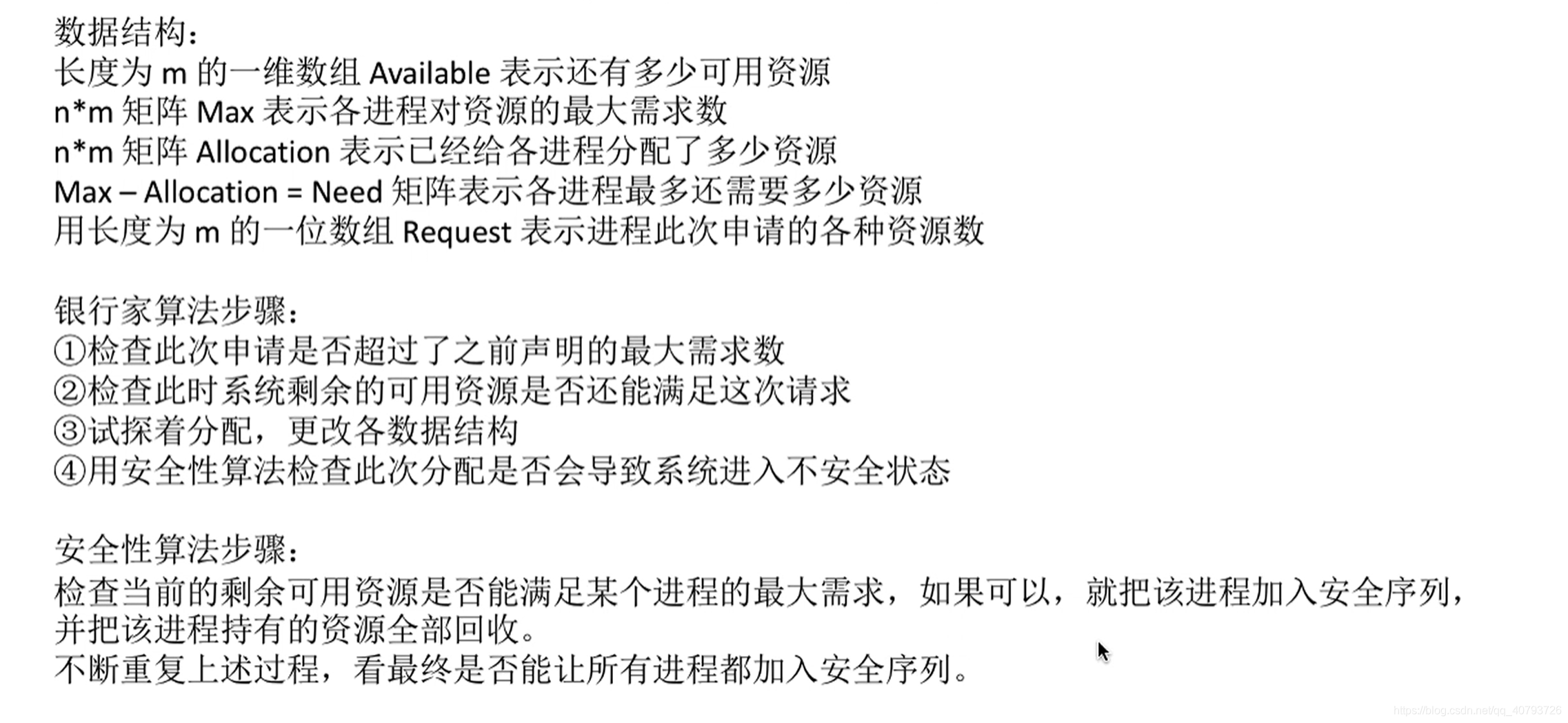
���м��㷨�ĺ���˼��:����Դ����֮ǰԤ���ж���η����Ƿ�ᵼ��ϵͳ���벻��ȫ״̬,�Դ˾����Ƿ��Ӧ��Դ��������
2.15.3 �����ļ��ͽ��
������Դ������Ϣ����������ߺͷ���߶�û����ȫ�����Ļ�,�ͷ���������,���ջ����űߵĽ��̾��Ǵ�������״̬�Ľ���
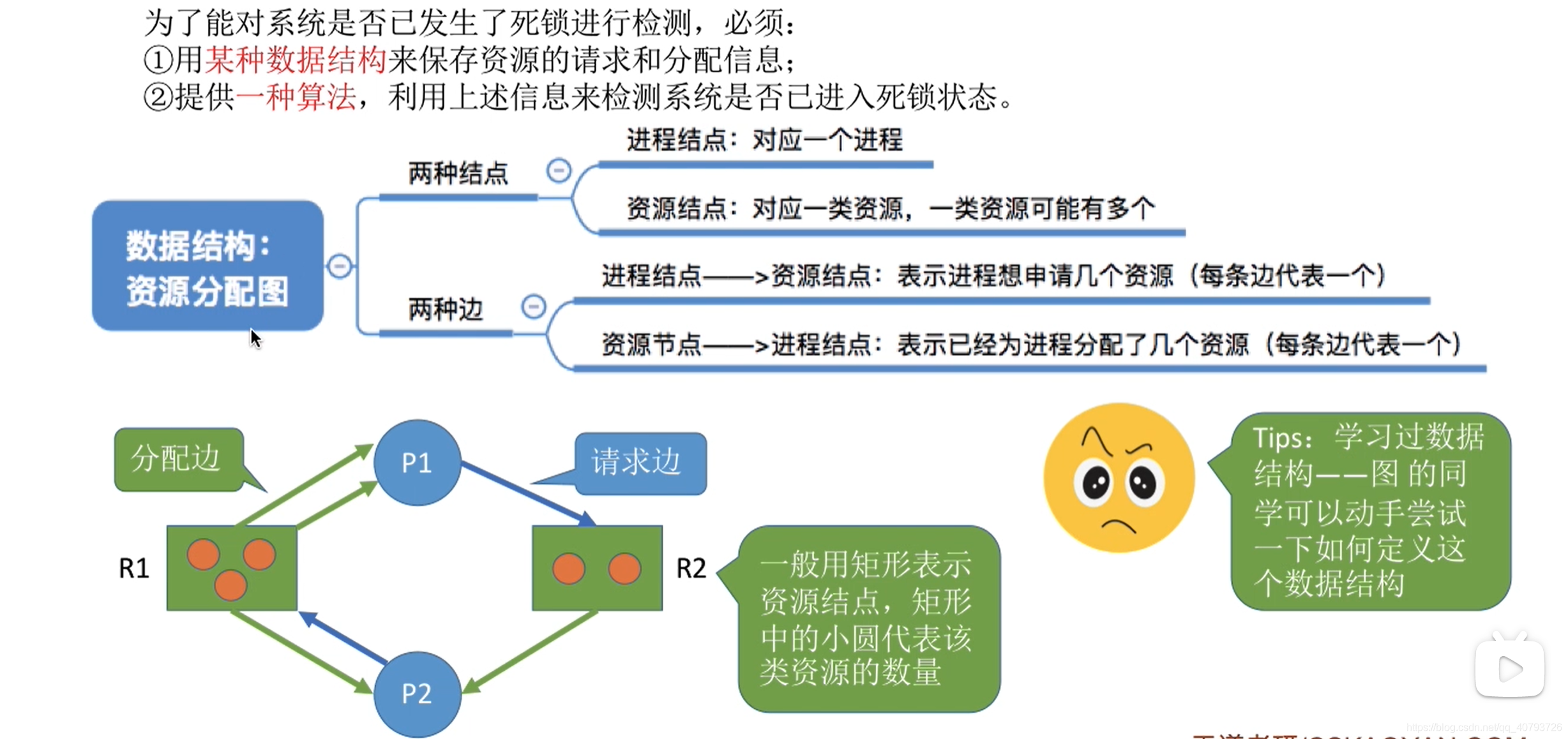
����������㷨:
- ����Դ����ͼ��,�ҳ��Ȳ������ֲ��ǹµ�Ľ���Pi ,���ϵͳ������������Դ��������ȥ�����е�����ߺͷ����,ʹ֮��Ϊ�����Ľ��
- pi�ͷ���Դ����Ի���ijЩ����,���������������м�,������ȥͼ�����еı�,���ͼ�ǿ���ȫ��
��������:���ijʱ��ϵͳ����Դ����ͼ�Dz�����ȫ��,��ô��ʱϵͳ����