����Ŀ¼
ǰ��
���,С����Ϊѧϰ��ԭ����Ҫʹ�õ�ROS,������CSDN���������˶���̳�,�������ǵIJ���������ʱ��,��������������������ҿ�ס�����˵���,�ھ�����һ��֮��,��Щ���ⶼӭ�ж��⡣Ϊ�˺����ο�,С�½����÷���������һ��,�Աʼǵ���ʽ����,���ҷ���,ϣ���ܶԴ������������
1. ��������
�˴�,������Ҫ�õ� VM Ware Workstation ȥ����һ�� Ubuntu18.04 �������,��������������� ROS Melodic ϵͳ������������Ҫ�ȴ� VM Ware �� Ubuntu �������ض�Ӧ�ij����ϵͳ����С���ڴ˸�������:
���������� Win10 ������,������������ VMware Workstation 16.1.2 Pro for Windows
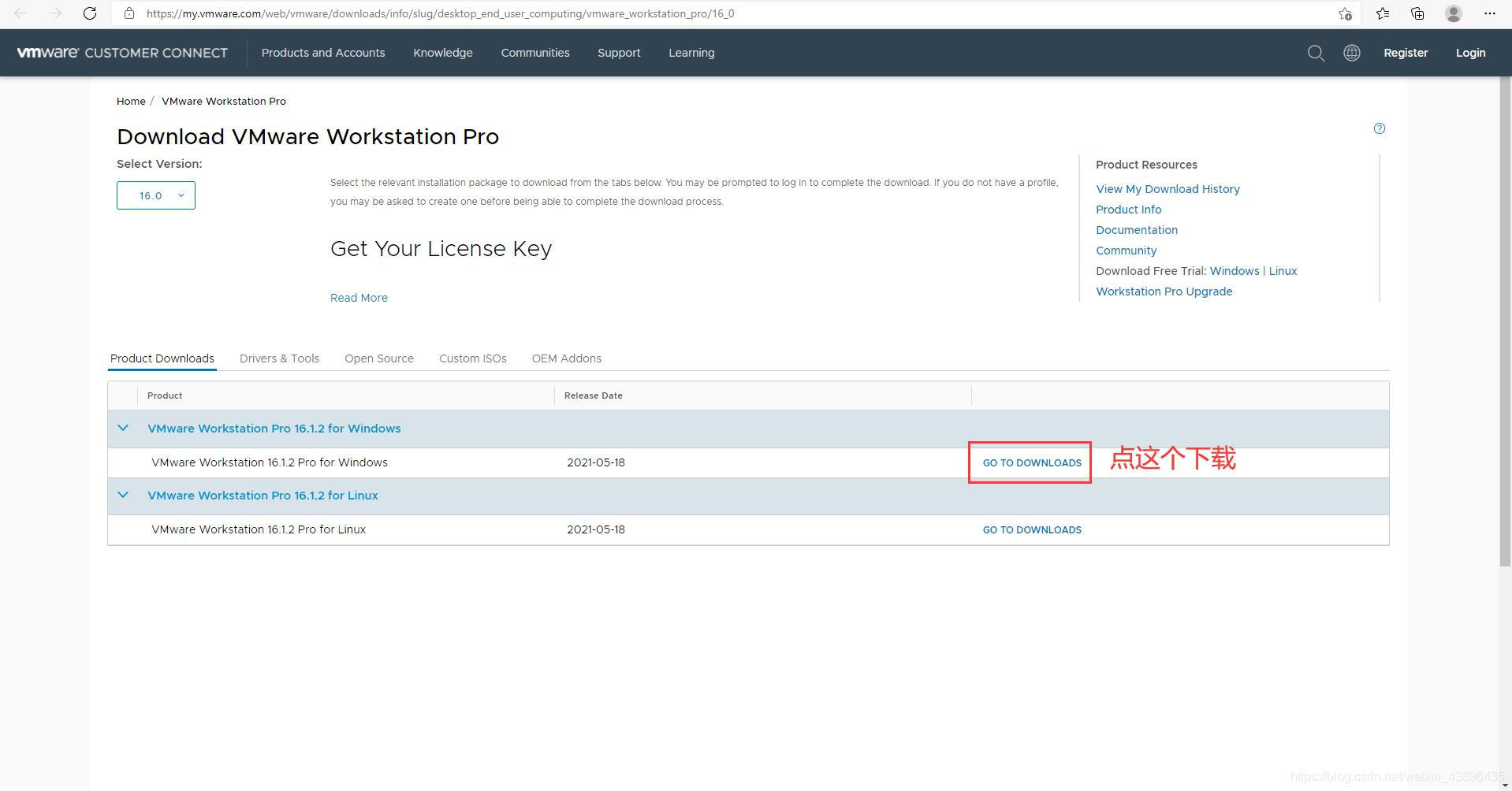

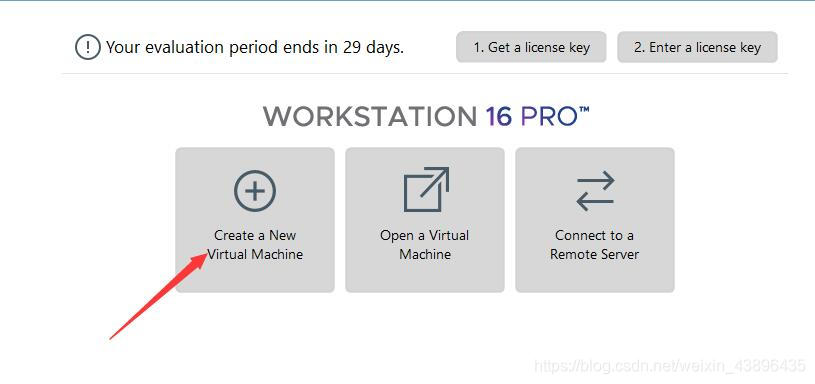
�������֮��װ VM Ware Workstation Pro���������ǵ�һ��ʹ���������,��ѡ����30�����á�
2. ��װUbuntu18
�� VM Ware Workstation,�½�һ���������
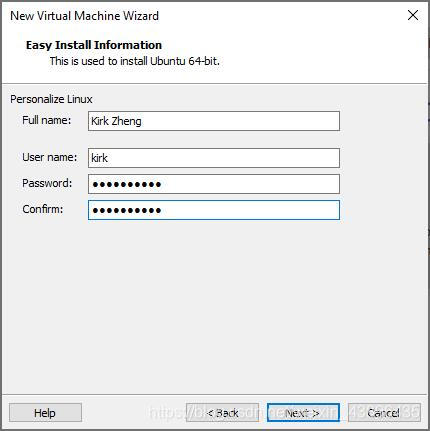
�þ���ģʽ���������:

ѡ��ո����ص�ϵͳ����

�����û��������롣
����������Ĵ洢����
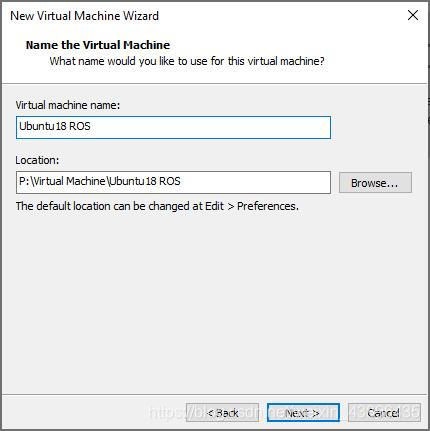
����,VM Ware��Ҫ�����ô���ռ��С���Դ�,����Ҫ������Ϊ25GB.��ΪС��֮����ܻ�������������һЩ�������,����Ӳ�̿ռ��㹻��������������һ���Ƚϴ�Ĵ洢�ռ䡣

���,�������������,���Զ�ʹ�õ��ڴ�ռ��С��ռ��ϵͳ���������������á���Щ����������֮��Ĺ��������á�����С����ʱ����Ĭ�ϡ�
���ˡ�Finish��֮��,ϵͳ�Ϳ�ʼ��ʼ���ˡ�������̿�����Ҫ�Ⱥܾ�,С���ȳ�ȥ����~
3. ��װ����ROS
����,���ǾͿ�ʼ�� Ubuntu18 �ϰ�װ������ ROS �������Դ�,Ubuntu��������ؽ̡̳�ֻ��С���ڸ��ݹ����̳̲���ʱ��,�м�����ס�ˡ���������,���ս��������,ϣ�����������д�����档
- �����̳�����:https://wiki.ros.org/melodic/Installation/Ubuntu
3.1 ��������Դ
��½�����֮��,ϵͳ���ܻ���ʾ��Ҫ���¡���ʱ��ǧ��Ҫ�����,��ΪMelodic�汾�������Ubuntu18,������µ����°�,����Ҫѡ�����°��ROS������,��������Ҫ��������Դ��
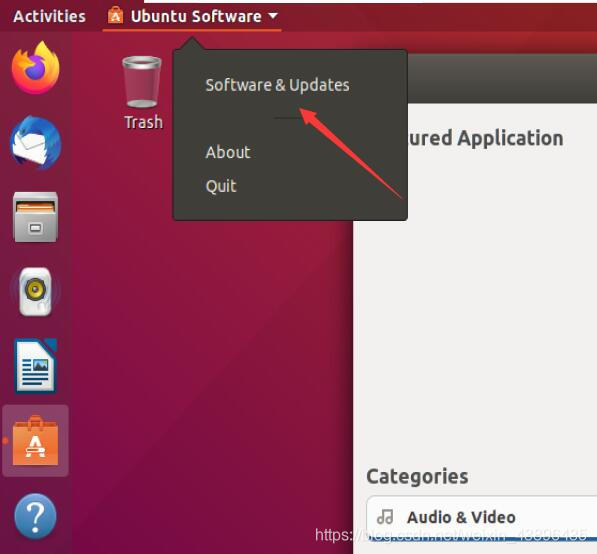
�Ҽ������������е� ��Ubuntu Software�� ��ǩ,����ѡ�� ��Software & Updates��
ȷ�������е�ǰ�ĸ�ѡ�����Ѿ���ѡ��
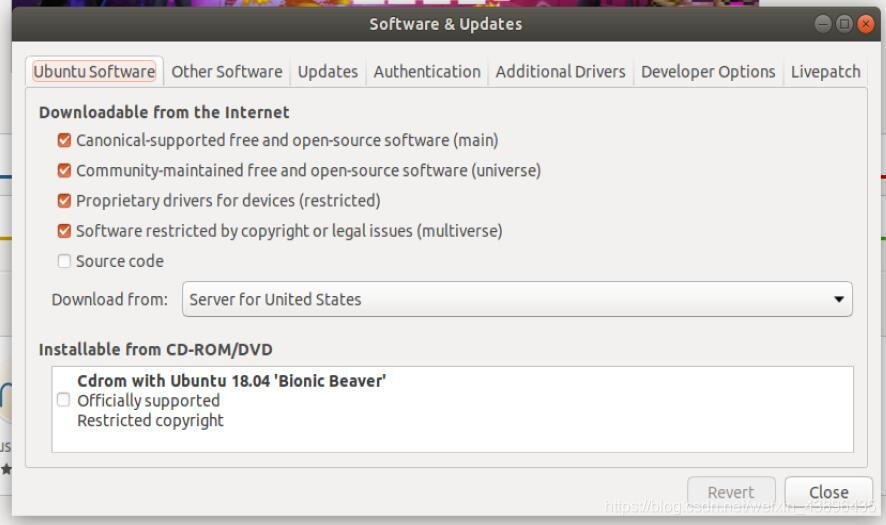
�������ǿ�����һ�� ��Download from�� ѡ�Ŀǰ�Ǵ������ķ��������صġ�����Ư������������Ʊػ��˷Ѻܶ�ʱ��,�����������������Ҫѡ����ڵķ�����(�簢���ơ��пƴ��),�����������ٶȡ�
����Ҳ���,�������˵���ѡ�� ��Other��,Ȼ��ֱ��ѡ�ð����Ʒ��������ߵ���Ҳࡰѡ����ѷ�������
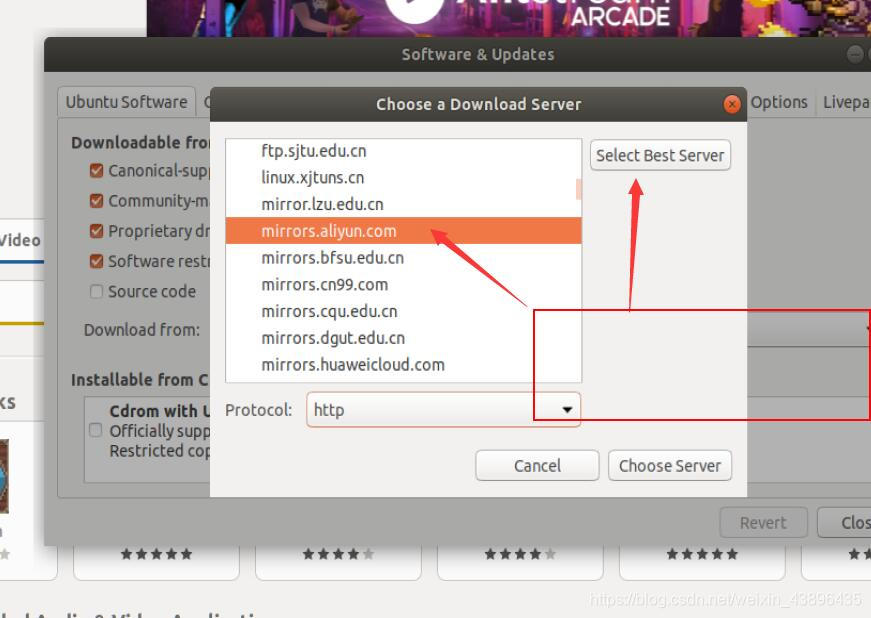
Ȼ�� ��Choose Server�� �������á�
������,���ǰ� 'Cplt + Alt + T�� ��һ���ն�,�����ݹ����̳̽��в�����
3.2 ����ר��Դ��ַ
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3.3 ������Կ
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654
��ʱ,ϵͳ��ӡ��������,��ʾ���ӳɹ�:
gpg: Total number processed: 1
gpg: imported: 1
3.4 ��װROS Melodic
����,������Ҫ���������б�
sudo apt-get update
Ϊ�˷������,����ֱ�Ӱ�װ ROS Melodic �����档
sudo apt install ros-melodic-desktop-full
����,��ʹ��װ��������,����ʹ�ù�����,���ǿ�����ʾȱ��ijЩ���,ֻҪ�������������Ƶ��������װ���ɡ�
sudo apt install ros-melodic-xxxxx # xxxxx ���滻���������
�ٸ�����:
sudo apt install ros-melodic-slam-gmapping
ͬ��,����Ҳ����������ָ���������õ����:
sudo apt search ros-melodic
��ʱ������Ҫ�ȴ��ܾúܾá�С���ֿ��Գ�ȥ����,�ÿ���o( ̄�� ̄)��
3.5 ��ʼ����������
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
3.6 ��װ�����������
sudo apt install python-rosdep python-rosinstall python-rosinstall-generator python-wstool build-essential
3.7 ��ʼ��rosdep
rosdep�ǻ���python�����ġ�����������Ҫ��װpython-rosdep
sudo apt install python-rosdep
���ݹ����Ľ���,������Ҫ�����·�ʽ��ʼ��rosdep
sudo rosdep init
rosdep update
����,���������,���ᱨһ������

����Ҫ������ϵͳû���ҵ�ͼ�� http://raw.githubusercontent.com �����ַ����һЩ����˵,�����õ��������ֻ��ȵ�֮����Խ��������⡣����С�»���ʧ���ˡ����,ֻ���Ƚ��ļ���������,��ȥ����Щ�ļ��ĵײ����,��Ԯ����ַ��Ϊ����Ŀ¼��
�����������:
- ���ؿ��ļ�
sudo apt install git
sudo git clone https://github.com/ros/rosdistro.git
- ���ν������ĸ��ļ��е� ��https://raw.githubusercontent.com/ros/rosdistro/master/�� ��Ϊ ��file:///home/kirk/rosdistro/���������ҵ��û���Ϊ kirk,�����ʹ�� kirk��������滻���Լ���·�����ơ�
rosdistro/rosdep/sources.list.d/20-default.list
/usr/lib/python2.7/dist-packages/rosdep2/gbpdistro_support.py
/usr/lib/python2.7/dist-packages/rosdep2/rep3.py
/usr/lib/python2.7/dist-packages/rosdistro/__init__.py
- ������ĵ�һ���ļ����Ƶ� /etc/ros/rosdep/sources.list.d Ŀ¼��(��Ҫ����Ŀ¼),��������������
sudo mkdir -p /etc/ros/rosdep/sources.list.d
sudo cp rosdistro/rosdep/sources.list.d/20-default.list /etc/ros/rosdep/sources.list.d/
- ���ִ�й����е������������Դ
rosdep update
3.8 ���� catkin
һ�������,���Ƕ���Ҫ�õ� catkin ��������ȥ������롣
��������Ҫ����һ������Ŀ¼��
mkdir -p catkin_ws/src # -p ��������������Ŀ¼
Ȼ���� catkin_ws Ŀ¼�г�ʼ�� catkin
cd catkin_ws/src
catkin_init_workspace
��ʱ,���ǾͿ����� catkin_ws Ŀ¼�±�����롣
cd ..
catkin_make
��ʱ,ϵͳ���Զ����� build �� devel ����Ŀ¼���������һ�»���������ɲ�����
source devel/setup.bash
�ܽ�
����,С���Ѿ��� Ubuntu18.04 �ϳɹ���װ�� ROS Melodic ���ɹ������˹���������֮��,�ҾͿ����� catkin_ws/src Ŀ¼�¼���Դ��,Ȼ����������Լ��Ĺ����ˡ���װ������������һЩ�������⼰��������ϣ���Դ������!