文章目录
引言
????????GPIO可以说是驱动中最最最简单的部分了,但网上有些文章用的都是Python或者shell脚本编写,通过第三方库,这并不算是真正的驱动编写,因为在编写过程中,你几乎没有涉及到底层硬件或寄存器操作。
????????所以本文是希望从零开始,在Linux内核下实现一个真正的GPIO驱动程序,初步体验一下Linux内核驱动模块的开发思想,知其然,知其所以然
第一步:先有一本BCM2835的Datasheet
????????有一本芯片手册,才可以看到芯片内部的总线和内存、寄存器等的分布,这是驱动开发的第一步,也是关键的一步。走驱动开发道路的同学,一定要有读英文芯片手册的能力。
????????下载地址 BCM2835 Datesheet
第二步:下载linux内核源码
????????这里建议下载和树莓派系统内核版本一致的linux内核源码,如果找不到可以下相近版本号下的不同更新系列。
源地址:kernel官方网站
没想要的看看可以这篇文章:linux源码下载教程
第三步:开始编写驱动
????????前面的准备工作已完成,我们现在开始编写驱动代码。
1、Datasheet中GPIO区(!!!非常重要!!!)
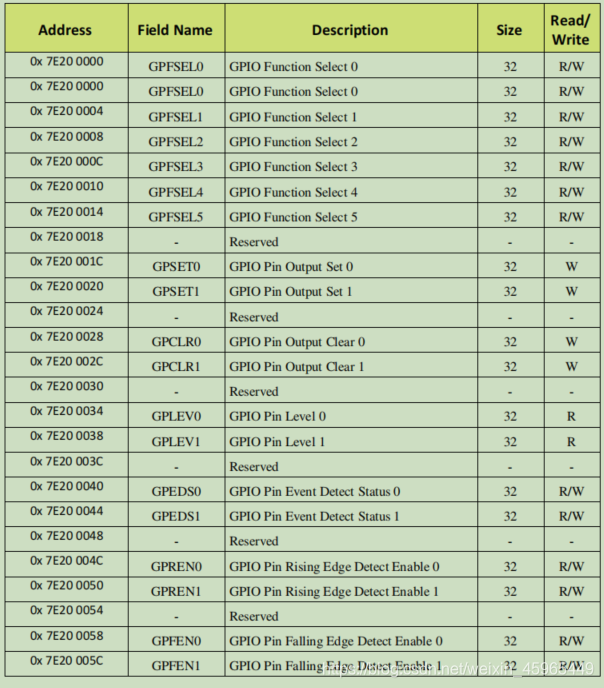
????????我们的目的很明确给GPIO编写驱动,所以直接翻到手册89页,看GPIO的内容。
????????如图是部分引脚的地址、名字、描述、大小以及读写权限。注意此处的Address,是驱动编写过程中的重要部分之一。一开始我以为这就是GPIO物理内存地址,文档也没有说明,写了半天代码一直都不成功。后来查了网上资料,发现树莓派3B/3B+的GPIO物理内存地址被映射到了0x3F200000!,我也是吐了。
????????但下面的偏移地址还是有用的,根据手册的描述,GPIO物理地址起始位置是0x7E200000,用图中的Address减去GPIO物理地址起始位置是0x7E200000,即是每个GPIO引脚的偏移量,至于啥是地址偏移量,做驱动开发之前都应该都知道,不知道到的话,先退出这一块吧。
????????综上所述,要想操控GPIO并编写驱动,所使用的使能GPIOx的地址应为0x3F200000 + GPIOx偏移量。
2、根据内核驱动框架GPIO驱动
????????对于驱动的编写,BCM2835有一套驱动框架,这个的话,大家自己去刚刚下载linux源码中找到原GPIO驱动文件,框架都是定死的,为了整个系统的稳定和统一,方便管理,这个点就不用想别的。驱动的添加都是以插入链表节点的形式,我们根据框架,编写好满足我们需求的程序。
2.1 驱动文件及框架
????????这里先给出根据框架编写好的驱动程序,细节部分我都一一注释了,下面讲解一下结构体和其他地方。
#include <linux/fs.h> //file_operations声明
#include <linux/module.h> //module_init module_exit声明
#include <linux/init.h> //__init __exit 宏定义声明
#include <linux/device.h> //class devise声明
#include <linux/uaccess.h> //copy_from_user 的头文件
#include <linux/types.h> //设备号 dev_t 类型声明
#include <asm/io.h> //ioremap iounmap的头文件
static struct class *pin5_class;
static struct device *pin5_class_dev;
static dev_t devno; //设备号
static int major =231; //主设备号
static int minor =1; //次设备号
static char *module_name="pin5"; //模块名
volatile unsigned int *GPFSEL0 = NULL;
volatile unsigned int *GPSET0 = NULL;
volatile unsigned int *GPCLR0 = NULL;
//led_open函数
static int pin5_open(struct inode *inode,struct file *file)
{
printk("pin5_open\n"); //内核的打印函数和printf类似
//&避免影响其他引脚
//bit12-14 配置成001 控制BCM pin5
*GPFSEL0 &= ~(0x6 << 12);
*GPFSEL0 |= (0x1 << 12);
return 0;
}
//led_write函数
static ssize_t pin5_write(struct file *file,const char __user *buf,size_t count, loff_t *ppos)
{
int usercmd;
printk("pin5_write\n");
//获取上层write函数的值 函数 copy_from_user
copy_from_user(&usercmd,buf,count);
//根据值来操作IO口
printk("get value\n");
if(usercmd == 1){
printk("BCM 5 SET \n");
*GPSET0 |= 0x01 << 4;
}else if(usercmd == 0){
printk("BCM 5 RESET\n");
*GPCLR0 |= 0x01 << 4;
}else{
printk("GPIO 0 do nothing\n");
}
return 0;
}
static struct file_operations pin5_fops = {
.owner = THIS_MODULE,
.open = pin5_open,
.write = pin5_write,
};
int __init pin5_drv_init(void)
{
int ret;
devno = MKDEV(major,minor); //创建设备号
//注册驱动 告诉内核,把这个驱动加入到内核驱动的链表中
ret = register_chrdev(major, module_name,&pin5_fops);
pin5_class=class_create(THIS_MODULE,"myfirstdemo");
//创建设备文件
pin5_class_dev =device_create(pin5_class,NULL,devno,NULL,module_name);
//把物理地址转换为虚拟地址,io口寄存器映射成普通内存单元进行访问
GPFSEL0 = (volatile unsigned int *)ioremap(0x3f200000,4);
GPSET0 = (volatile unsigned int *)ioremap(0x3f20001c,4);
GPCLR0 = (volatile unsigned int *)ioremap(0x3f200028,4);
return 0;
}
void __exit pin5_drv_exit(void)
{
iounmap(GPFSEL0);
iounmap(GPSET0);
iounmap(GPCLR0);
device_destroy(pin5_class,devno);
class_destroy(pin5_class);
unregister_chrdev(major, module_name); //卸载驱动
}
module_init(pin5_drv_init); //驱动添加入口
module_exit(pin5_drv_exit);
MODULE_LICENSE("GPL v2");
2.2 框架解释
static的作用
????????防止与其他的文件有变量命名冲突,static限定变量的作用域仅仅只在这个文件。
结构体成员变量的单独赋值
// 驱动链表结构体,这个连接上层应用函数,给用户暴露接口,如熟悉的open\write\read等上层接口。
struct file_operations {
struct module *owner;
loff_t (*llseek) (struct file *, loff_t, int);
ssize_t (*read) (struct file *, char __user *, size_t, loff_t *);
ssize_t (*write) (struct file *, const char __user *, size_t, loff_t *);
ssize_t (*aio_read) (struct kiocb *, const struct iovec *, unsigned long, loff_t);
ssize_t (*aio_write) (struct kiocb *, const struct iovec *, unsigned long, loff_t);
int (*readdir) (struct file *, void *, filldir_t);
unsigned int (*poll) (struct file *, struct poll_table_struct *);
long (*unlocked_ioctl) (struct file *, unsigned int, unsigned long);
long (*compat_ioctl) (struct file *, unsigned int, unsigned long);
int (*mmap) (struct file *, struct vm_area_struct *);
int (*open) (struct inode *, struct file *);
int (*flush) (struct file *, fl_owner_t id);
int (*release) (struct inode *, struct file *);
int (*fsync) (struct file *, loff_t, loff_t, int datasync);
int (*aio_fsync) (struct kiocb *, int datasync);
int (*fasync) (int, struct file *, int);
int (*lock) (struct file *, int, struct file_lock *);
ssize_t (*sendpage) (struct file *, struct page *, int, size_t, loff_t *, int);
unsigned long (*get_unmapped_area)(struct file *, unsigned long, unsigned long, unsigned long, unsigned long);
int (*check_flags)(int);
int (*flock) (struct file *, int, struct file_lock *);
ssize_t (*splice_write)(struct pipe_inode_info *, struct file *, loff_t *, size_t, unsigned int);
ssize_t (*splice_read)(struct file *, loff_t *, struct pipe_inode_info *, size_t, unsigned int);
int (*setlease)(struct file *, long, struct file_lock **);
long (*fallocate)(struct file *file, int mode, loff_t offset,loff_t len);
int (*show_fdinfo)(struct seq_file *m, struct file *f);
};
//这个file_operations 的实例化,这里仅使用部分函数.
//如下代码我们要给上层功能接口,赋值给予功能,不然这个上层接口只不过是个空壳。
static struct file_operations pin5_fops = {
.owner = THIS_MODULE,
.open = pin5_open,
.write = pin5_write,
};
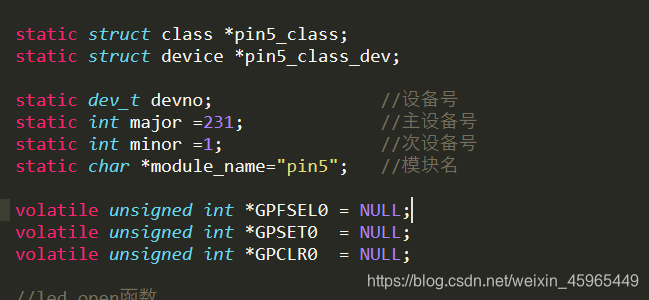
如下图所示,是GPIO驱动的主设备号、次设备号等信息,其中变量module_name指明的是驱动的名称,就是在/dev目录下所显示名字
3、编写用户程序
????????此程序用来测试,我们编写的驱动程序是否有效,示例如下:
#include <sys/types.h>
#include <sys/stat.h>
#include <fcntl.h>
#include <stdio.h>
int main()
{
int fd;
int cmd;
int data;
fd = open("/dev/pin5",O_RDWR);
scanf("%d",&cmd);
if(cmd == 1){
data = 1;
}else if(cmd == 0){
data = 0;
}
printf("data = %d\n",data);
fd = write(fd,&data,1);
return 0;
}
第四步:编译驱动程序
1、字符设备驱动
????????驱动设备一共有三种类型,而我们所编写的GPIO启动属于其中的字符驱动。所以要把编写好的驱动程序放到对应的目录下,目录如下:
????????…/linux-rpi-4.14.y/drivers/char
????????当然也不一定非要放在char目录下,这样只是为了少些几个字。若你把驱动程序放在别的地方。记得在Makefile中指明路径。
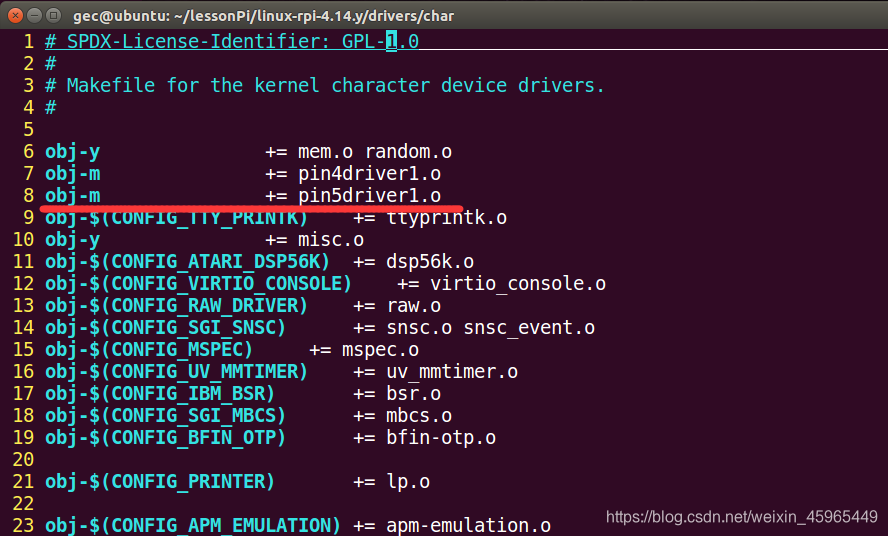
2、修改char目录下的Makefile文件
????????我们在此按Module类型进行编译生成,并指明编译后的.o文件名,然后保存退出。
obj-m += pin5driver1.o
3、编译
3.1 内核驱动编译
????????我们退回到内核源码起始目录下,…/linux-rpi-4.14.y

输入以下命令进行内核驱动编译
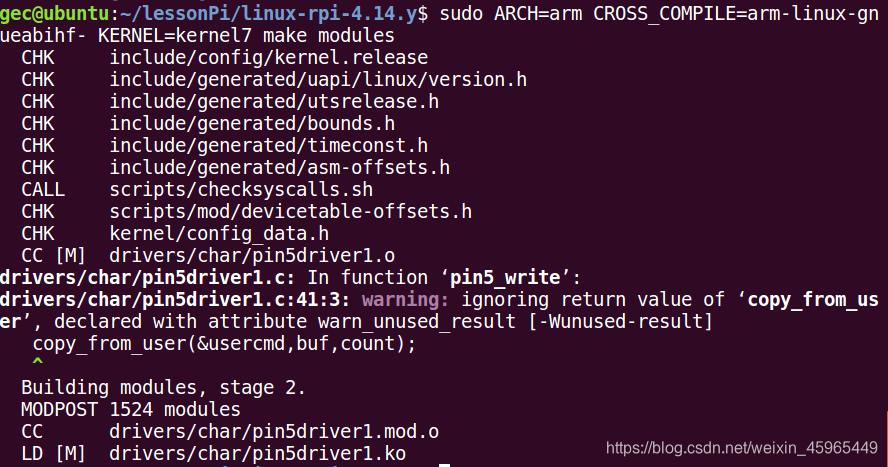
sudo ARCH=arm CROSS_COMPILE=arm-linux-gnueabihf- KERNEL=kernel7 make modules
编译需要等待一会,根据实际情况而定,成功后,生成xxx.ko文件,提示如下图:
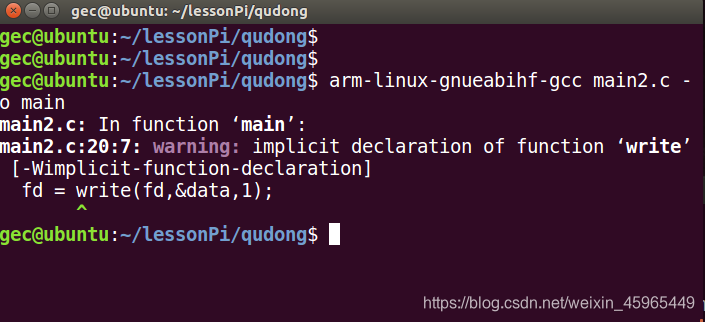
3.2用户程序编译
????????对于用户程序的编译,我们使用到了arm交叉编译工具链,没有或想快速上手的话,自己在移植的设备中编写,编译即可,都一样的。
第五步:功能测试
1、SCP命令传输驱动程序和用户程序
很简单的命令,格式如下:
scp main pi@[IP地址]:[所要传输至的目录]
scp pin5driver1.ko pi@[IP地址]:[所要传输至的目录]
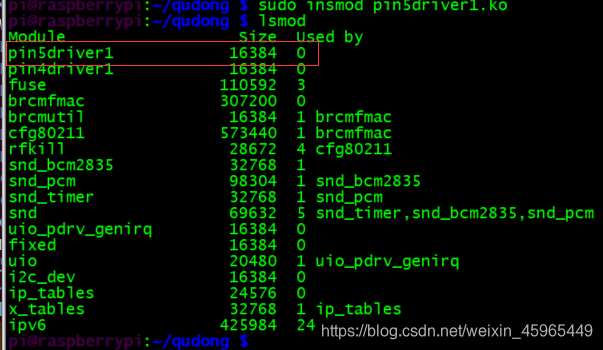
2、插入驱动到设备驱动链表
这里不多做解释,命令如下:
sudo insmod xxxx.ko 加载内核驱动
lsmod 查看驱动是否插入成功
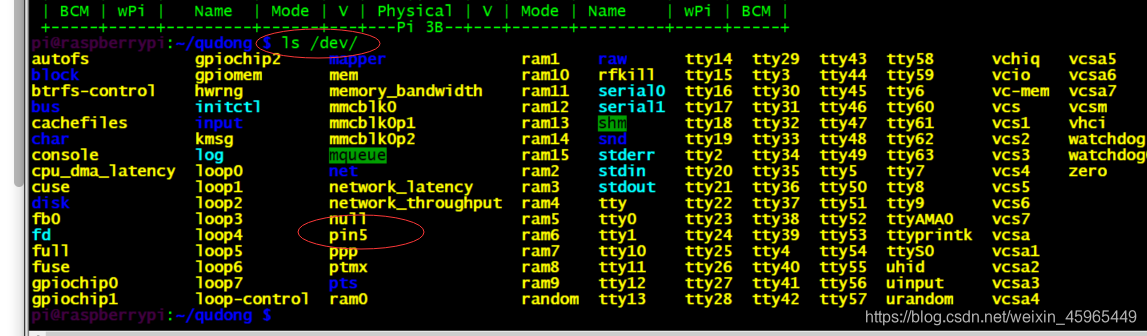
输入ls /dev 可以看到pin5结点,说明插入成功
3、运行用户程序
更改/dev/pin5的操作权限
输入命令 sudo chmod 777 /dev/pin5
如果此处不更改权限可能出现用户程序无法使用驱动或其他错误,如下:
错误1
错误2
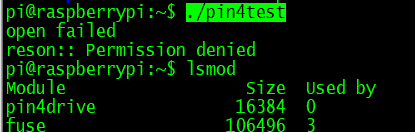
做完以上工作后,我们就可以直接运行用户程序了:
./main

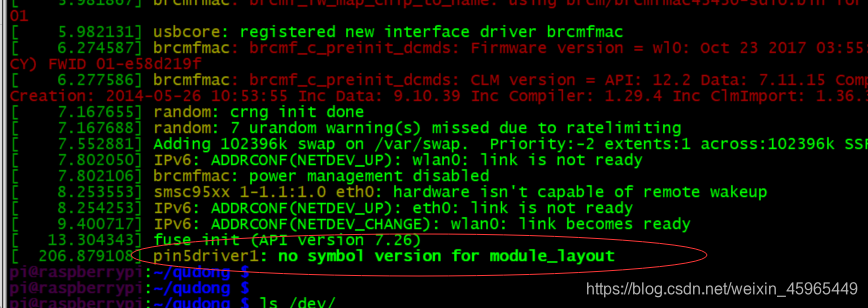
再通过dmesg查看内核打印信息
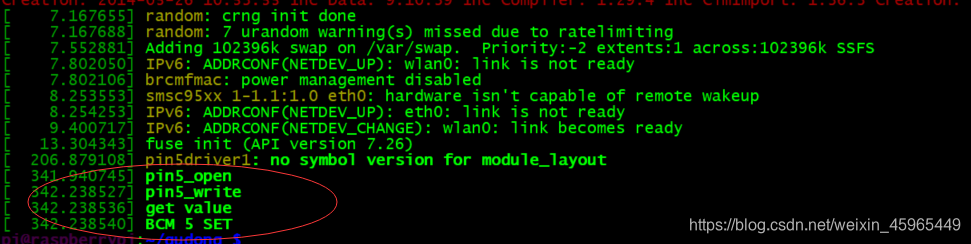
出现如图所示标志1和标志2,说明我们的内核驱动编写是成功的。
标志1
????????含有pin5_open\pin5_write\get value\BCM 5 SET等信息,标志成功
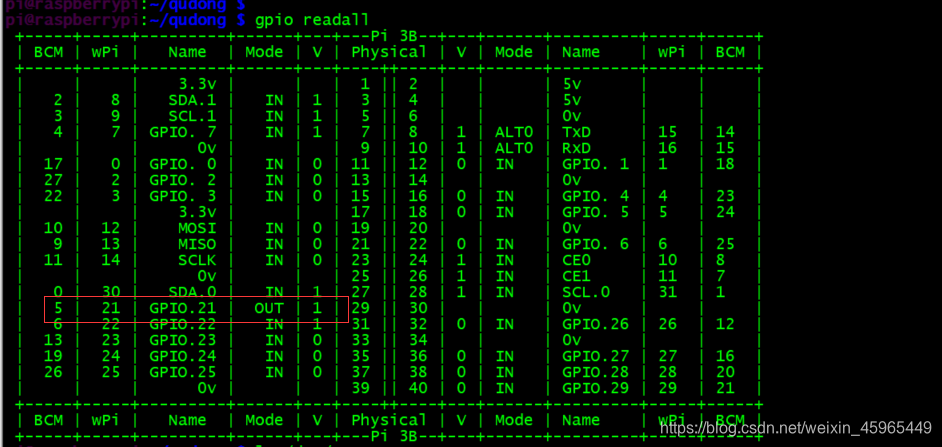
标志2
????????BCM 5 引脚由原来的
????????MODE:IN,V:0
????????变成了
????????MODE:OUT,V:1,
????????说明成功
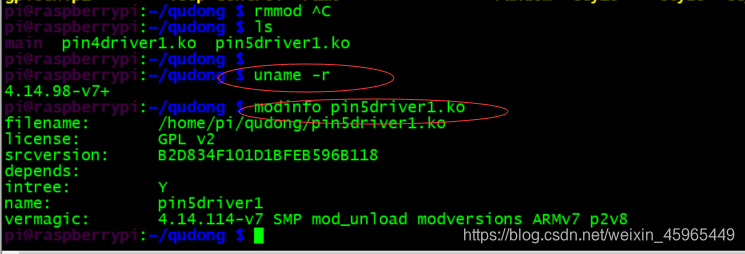
4、查看内核版本指令
????????查看内核版本主要是为了确定,我们将驱动移植到的设备系统的版本以及编译环境的内核版本。
用到了两条指令,
uname -runame -r 用来查看系统内核版本
modinfo pin5driver1.ko 用来再次确定驱动ko文件的内核版本
最后:总结
1、编写内核驱动必须遵循整个驱动框架的编写规则。
2、现有的设备驱动链表中添加驱动,必须符合整个设备驱动链表形式。
3、使用到了insmod插入结点\rmmod删除结点等命令。
4、内核驱动编译命令\用户程序编译命令的格式
5、编译环境、linux内核源码以及移植设备,这三者的内核版本,必须一致或相近,不然会出现实验失败情况。
最近,还是要接着更新linux系统编程内容部分内容,接着往下写。
上次写到了这里:
linux系统编程之进程(全)
linux网络编程之sockaddr与sockaddr_in