Anycloud37E����Ubuntu21.04���뻷���
0. ���ذ�װ Ubuntu 21.04
-
��������ubuntu21.04����(ubuntu-21.04-desktop-amd64.iso)
-
����Virtualbox��װϵͳ
-
����ϵͳ��,���������ն�(ALT+CTRL+T), ����ϵͳ����ػ���:
ѡ��һ�����ڵĸ���Դ,����:
sudo update-manager
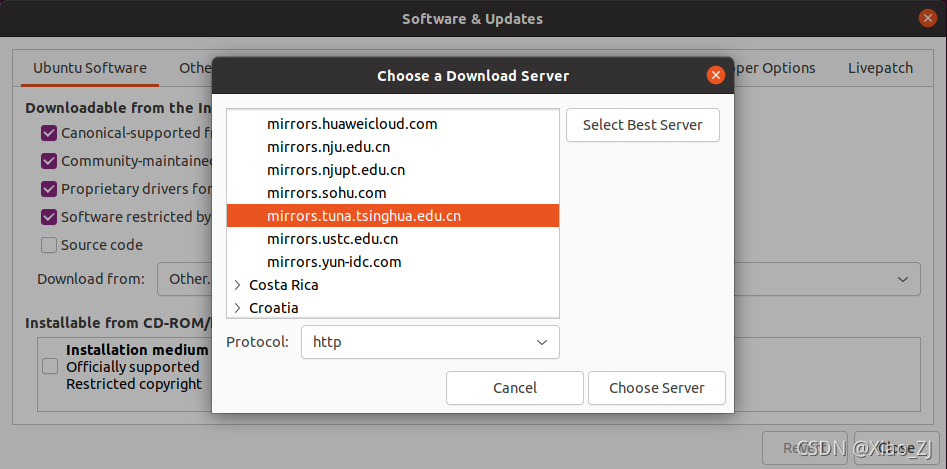
ѡ�����Դ��,Ȼ���ֶ����и���:
sudo apt-get update sudo apt-get upgradeNote:
? �����°汾ϵͳĬ�ϲ���ifconfig����,���������а�װ
sudo apt-get install net-tools
1. ���ذ�װ��������⡢����
����SDK��Ҫ�����Ŀ�:
sudo apt-get install gcc-multilib
sudo apt-get install libstdc++6
sudo apt-get install make cmake
sudo apt-get install zlib1g-dev lib32z1-dev
sudo apt-get install liblzo2-dev liblzo2-2 liblzo2-dev:i386
sudo apt-get install u-boot-tools
sudo apt-get install lib32ncurses6 libncurses5-dev
sudo apt-get install libmpfr-dev libmpfr6 libmpfr6:i386
sudo apt-get install mtd-utils
sudo apt-get install libtool
sudo apt-get install cpp g++
sudo apt-get install gawk
sudo apt-get install gcc perl
���ؿ���������Ҫ�Ĺ���:
sudo apt-get install net-tools
sudo apt-get install python
sudo apt-get install autoconf
sudo apt-get install vim exuberant-ctags cscope
sudo apt-get install git gitk
sudo apt-get install ssh
sudo apt-get install samba
sudo apt-get install unrar
sudo apt-get install p7zip-full
sudo apt-get install meld
sudo apt-get install ffmpeg
sudo apt-get install tree
sudo apt-get install scons
sudo apt-get install bison
sudo apt-get install flex
sudo apt-get install dos2unix
2. ���ý��湤���
-
��toolĿ¼����Ĺ����������� /opt Ŀ¼��,Ȼ���ѹ:
tar xzf AK37E_SDK_V1.02.tar.gz -
����ϵͳ��������PATH, ��~/.bashrc ,��������:
export PATH="${PATH}:/opt/arm-anykav500-linux-uclibcgnueabi/bin"���µ��ն˽���,ȷ��PATH�Ѿ����ӹ�����·��,��������:
anyka@anyka-VirtualBox:~/project/AK37E_SDK_V1.02$ arm-anykav500-linux-uclibcgnueabi-gcc -v Using built-in specs. COLLECT_GCC=/opt/arm-anykav500-linux-uclibcgnueabi/bin/arm-anykav500-linux-uclibcgnueabi-gcc.br_real COLLECT_LTO_WRAPPER=/opt/arm-anykav500-linux-uclibcgnueabi/bin/../libexec/gcc/arm-anykav500-linux-uclibcgnueabi/4.9.4/lto-wrapper Target: arm-anykav500-linux-uclibcgnueabi Configured with: ./configure --prefix=/home/chehongfeng/toolchain_release --sysconfdir=/home/chehongfeng/toolchain_release/etc --enable-static --target=arm-anykav500-linux-uclibcgnueabi --with-sysroot=/home/chehongfeng/toolchain_release/arm-anykav500-linux-uclibcgnueabi/sysroot --disable-__cxa_atexit --with-gnu-ld --disable-multilib --with-gmp=/home/chehongfeng/toolchain_release --with-mpc=/home/chehongfeng/toolchain_release --with-mpfr=/home/chehongfeng/toolchain_release --with-pkgversion='Buildroot 2018.02.7_V1.0.03-g9ff3371' --with-bugurl=http://bugs.buildroot.net/ --disable-libquadmath --disable-libsanitizer --enable-tls --disable-libmudflap --enable-threads --without-isl --without-cloog --with-float=soft --disable-decimal-float --with-abi=aapcs-linux --with-cpu=arm926ej-s --with-float=soft --with-mode=arm --enable-languages=c,c++ --with-build-time-tools=/home/chehongfeng/toolchain_release/arm-anykav500-linux-uclibcgnueabi/bin --enable-shared --disable-libgomp --enable-libssp Thread model: posix gcc version 4.9.4 (Buildroot 2018.02.7_V1.0.03-g9ff3371)�ܹ���������
arm-anykav500-linux-uclibcgnueabi-gcc -v����.
3. �������Kernel��������
�ڱ����ں�ʱ,��������´���:
-
libmpfr�����쳣
anyka@anyka-VirtualBox:~/project/AK37E_SDK_V1.02/os$ ./build_kernel.sh CROSS_COMPILE : arm-anykav500-linux-uclibcgnueabi- make[1]: Entering directory '/home/anyka/project/AK37E_SDK_V1.02/os/bd' GEN ./Makefile # # configuration written to .config # make[1]: Leaving directory '/home/anyka/project/AK37E_SDK_V1.02/os/bd' make[1]: Entering directory '/home/anyka/project/AK37E_SDK_V1.02/os/bd' GEN ./Makefile scripts/kconfig/conf --silentoldconfig Kconfig CHK include/config/kernel.release Using /home/anyka/project/AK37E_SDK_V1.02/os/kernel as source for kernel GEN ./Makefile CHK include/generated/uapi/linux/version.h CHK include/generated/utsrelease.h make[2]: 'include/generated/mach-types.h' is up to date. CC kernel/bounds.s /opt/arm-anykav500-linux-uclibcgnueabi/bin/../libexec/gcc/arm-anykav500-linux-uclibcgnueabi/4.9.4/cc1: error while loading shared libraries: libmpfr.so.4: cannot open shared object file: No such file or directory make[2]: *** [/home/anyka/project/AK37E_SDK_V1.02/os/kernel/./Kbuild:20: kernel/bounds.s] Error 1 make[1]: *** [/home/anyka/project/AK37E_SDK_V1.02/os/kernel/Makefile:1040: prepare0] Error 2 make[1]: Leaving directory '/home/anyka/project/AK37E_SDK_V1.02/os/bd' make: *** [Makefile:152: sub-make] Error 2�������:
sudo ln -s /usr/lib/x86_64-linux-gnu/libmpfr.so.6 /usr/lib/x86_64-linux-gnu/libmpfr.so.4 -
yylloc���Ŵ���
CALL /home/anyka/project/AK37E_SDK_V1.02/os/kernel/scripts/checksyscalls.sh HOSTCC scripts/dtc/dtc.o HOSTCC scripts/dtc/flattree.o HOSTCC scripts/dtc/fstree.o HOSTCC scripts/dtc/data.o HOSTCC scripts/dtc/livetree.o HOSTCC scripts/dtc/treesource.o HOSTCC scripts/dtc/srcpos.o HOSTCC scripts/dtc/checks.o HOSTCC scripts/dtc/util.o SHIPPED scripts/dtc/dtc-lexer.lex.c SHIPPED scripts/dtc/dtc-parser.tab.h HOSTCC scripts/dtc/dtc-lexer.lex.o SHIPPED scripts/dtc/dtc-parser.tab.c HOSTCC scripts/dtc/dtc-parser.tab.o HOSTLD scripts/dtc/dtc /usr/bin/ld: scripts/dtc/dtc-parser.tab.o:(.bss+0x10): multiple definition of `yylloc'; scripts/dtc/dtc-lexer.lex.o:(.bss+0x0): first defined here collect2: error: ld returned 1 exit status make[3]: *** [scripts/Makefile.host:100: scripts/dtc/dtc] Error 1 make[2]: *** [/home/anyka/project/AK37E_SDK_V1.02/os/kernel/scripts/Makefile.build:484: scripts/dtc] Error 2 make[1]: *** [/home/anyka/project/AK37E_SDK_V1.02/os/kernel/Makefile:558: scripts] Error 2 make[1]: Leaving directory '/home/anyka/project/AK37E_SDK_V1.02/os/bd' make: *** [Makefile:152: sub-make] Error 2�������:
...... 186 187 extern YYSTYPE yylval; 188 //extern YYLTYPE yylloc; 189 int yyparse (void); ...... 1193 /* The lookahead symbol. */ 1194 int yychar; 1195 1196 /* The semantic value of the lookahead symbol. */ 1197 YYSTYPE yylval; 1198 /* Location data for the lookahead symbol. */ 1199 static YYLTYPE yylloc 1200 # if defined YYLTYPE_IS_TRIVIAL && YYLTYPE_IS_TRIVIAL 1201 = { 1, 1, 1, 1 } 1202 # endif 1203 ; 1204 /* Number of syntax errors so far. */ 1205 int yynerrs; 1206 ......����
yyllocΪ�ֲ�����.
4. ����SDK
4.1 ��������SDK
�ڶ���Ŀ¼����:./auto_build.sh
�˽ű�Ĭ��ֻ֧�ֵ�һ���õ�SDK����,��ΪĬ�ϻ����½�ѹKernel��uboot����.
����,��һ�α������,�����Ľű�:
6 # ����Ƿ��в�����kernelĿ¼
7 #if test -d kernel ; then
8 # rm -rf kernel
9 #fi
10
11 # ��ѹ���ں�,�����б���
12 #tar xvfz linux.tar.gz
13 ./build_kernel.sh
14 ./build_kernel.sh -i
15
16 # ����Ƿ���ڱ������
17 if test $? -ne 0 ; then
18 echo "Kernel build failed!"
19 exit
20 fi
21
22 # ����Ƿ��в�����ubootĿ¼
23 #if test -d uboot ; then
24 # rm -rf uboot
25 #fi
26
27 # ��ѹ��uboot,�����б���
28 #tar xvfz uboot.tar.gz
29 ./build_uboot.sh
30 ./build_uboot.sh -i
ȥ��ɾ����Ŀ¼,���½�ѹ�Ķ���.
4.2 ��������kernel
��ת��osĿ¼,ֱ�����нű�:
./build_kernel.sh
./build_kernel.sh -i
4.3 ��������U-boot
ͬ����osĿ¼��,���нű�:
./build_uboot.sh
./build_uboot.sh -i
4.4 ����sample��rootfs
�ڶ���Ŀ¼��,����Ĭ�Ͻű�:./make_image.sh
���ϲ�����ɺ�,��Ҫ�ֶ�������ؾ�����¼Ŀ¼:cp -rf image/* tools/burntool
5. ��¼�̼�
5.1 ������Ӧdtb���õ�burntoolĿ¼
Ĭ����Ҫ�ֶ�������Ӧdtb����¼����Ŀ¼��,��ʹ��norflash��rgb���İ�:
cp image/EVB_CBDR_AK3760E_V1.0.1.dtb tools/burntool/cloudOS.dtb
5.2 ʹ��burntool��¼
��tool/burntool�������¼����,ѡ���Ӧ��nor��оƬ����,Ȼ�������¼.