作者:zzssdd2
E-mail:zzssdd2@foxmail.com
一、说明
- 主机系统:Ubuntu 20.04.3 LTS
- 开发板:TOPEET-IMX6ULL
- Uboot版本:imx_v2020.04_5.4.70_2.3.0
- 交叉编译器:gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf
二、环境搭建
2.1、uboot源码
-
获取NXP维护的uboot源码:
git clone https://source.codeaurora.org/external/imx/uboot-imx -
使用命令
git branch -a查看分支然后切换到目标分支git checkout imx_v2020.04_5.4.70_2.3.0 -
接下来就基于该分支源码进行uboot的移植(根目录下README文件有助于了解uboot的编译移植)
2.2、交叉编译器
-
在armDeveloper网站下载交叉编译工具
GNU Toolchain for the A-profile Architecture: 10.3-2021.07 | |__ x86_64 Linux hosted cross compilers | |__ AArch32 target with hard float (arm-linux-none-gnueabihf) | |__ gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf.tar.xz -
将工具解压至本地
# 创建文件夹 sudo mkdir /usr/local/arm # 拷贝文件 sudo cp gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf.tar.xz /usr/local/arm/ # 解压文件 sudo tar -vxf /usr/local/arm/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf.tar.xz -
可以导入工具链到环境变量中
# 导入到系统环境变量(对所有用户有效) sudo vim /etc/profile export PATH=$PATH:/usr/local/arm/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf/bin # 或导入到用户环境变量(仅对当前用户有效) sudo vim ~/.bashrc export PATH=$PATH:/usr/local/arm/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf/bin
三、编译源码
手上的开发板参考NXP官方的EVK开发板设计,所以移植都是参考mx6ullevk开发板相关代码进行
-
查看
board/freescale/mx6ullevk文件夹下面的README文件说明 -
新建编译脚本文件
make.sh并增加可执行权限chmod +x make.sh
#!/bin/bash
# 若之前已经导入到环境变量则不需要
export PATH=$PATH:/usr/local/arm/gcc-arm-10.3-2021.07-x86_64-arm-none-linux-gnueabihf/bin
# 若已经在顶层Makefile文件中指定则不需要
export ARCH=arm
# 若已经在顶层Makefile文件中指定则不需要
export CROSS_COMPILE=arm-none-linux-gnueabihf-
make distclean
# make mrproper
make mx6ull_14x14_evk_emmc_defconfig
make
-
执行编译
./make.sh并等待完成。 -
编译源码这一步的目的:一是为了验证编译环境是否正常;二是为了下一步移植过程中的代码分析(一些文件只有在编译后才会生成)
注意:若是在系统上第一次编译uboot源码可能会遇到缺少bison、flex的报错信息导致编译失败,只需安装后重新执行编译即可
# 语法分析工具
sudo apt install bison
# 词法分析工具
sudo apt install flex
四、移植
4.1、工程管理
-
Ubuntu上安装VScode
-
uboot源码根目录创建文件夹
.vscode。使用VScode打开uboot源码文件夹,然后点击文件->将工作区另存为...保存文件名uboot.code-workspace在.vscode文件夹下。内容如下{ "folders": [ { "path": ".." } ], "settings": { "files.associations": { "*.cfg": "c", "*.S": "c", } } } -
为了便于文件分析,在搜索和源码中隐藏一些不需要的文件,保留imx6相关文件。在
.vscode目录下新建文件settings.json,添加以下内容{ "search.exclude": { "**/node_modules": true, "**/bower_components": true, "**/*.code-search": true, "arch/ar[!m]":true, "arch/m*":true, "arch/n*":true, "arch/p*":true, "arch/r*":true, "arch/s*":true, "arch/x*":true, "arch/arm/mach-[a-h,j-z]*":true, "arch/arm/mach-i[!m]*":true, "arch/arm/mach-imx/i*":true, "arch/arm/mach-imx/mx[!6]*":true, "arch/arm/cpu/arm[!v]*":true, "arch/arm/cpu/armv7m":true, "arch/arm/cpu/armv8":true, "arch/arm/cpu/pxa":true, "arch/arm/cpu/sa1100":true, "arch/arm/dts/[a-h,j-z,A-L,N-Z]*":true, "arch/arm/dts/imx[!6]*":true, "board/[a-e,g-z,0-9,A-Z]*":true, "board/fir*":true, "board/freescale/[a-l,n-z,A-Z]*":true, "board/freescale/m[!x]*":true, "board/freescale/mx[!6]*":true, "configs/[0-9,a-l,n-z,A-Z]*":true, "configs/m[!x]*":true, "configs/mx[!6]*":true, "include/configs/[0-9,a-l,n-z,A-Z]*":true, "include/configs/m[!x]*":true, "include/configs/mx[!6]*":true, }, "files.exclude": { "**/.git": true, "**/.svn": true, "**/.hg": true, "**/CVS": true, "**/.DS_Store": true, "**/Thumbs.db": true, "arch/ar[!m]":true, "arch/m*":true, "arch/n*":true, "arch/p*":true, "arch/r*":true, "arch/s*":true, "arch/x*":true, "arch/arm/mach-[a-h,j-z]*":true, "arch/arm/mach-i[!m]*":true, "arch/arm/mach-imx/i*":true, "arch/arm/mach-imx/mx[!6]*":true, "arch/arm/cpu/arm[!v]*":true, "arch/arm/cpu/armv7m":true, "arch/arm/cpu/armv8":true, "arch/arm/cpu/pxa":true, "arch/arm/cpu/sa1100":true, "arch/arm/dts/[a-h,j-z,A-L,N-Z]*":true, "arch/arm/dts/imx[!6]*":true, "board/[a-e,g-z,0-9,A-Z]*":true, "board/fir*":true, "board/freescale/[a-l,n-z,A-Z]*":true, "board/freescale/m[!x]*":true, "board/freescale/mx[!6]*":true, "configs/[0-9,a-l,n-z,A-Z]*":true, "configs/m[!x]*":true, "configs/mx[!6]*":true, "include/configs/[0-9,a-l,n-z,A-Z]*":true, "include/configs/m[!x]*":true, "include/configs/mx[!6]*":true, } } -
安装
C/C++插件。在.vscode目录下新建文件c_cpp_properties.json内容如下{ "configurations": [ { "name": "Linux", "includePath": [ "${default}" ], "compilerPath": "/usr/bin/gcc", "cStandard": "gnu11", "cppStandard": "gnu++14", "intelliSenseMode": "linux-gcc-x64", "forcedInclude": ["${workspaceFolder}/u-boot.cfg"] } ], "version": 4 }u-boot.cfg文件为uboot编译后生成的文件,里面包含源码中的宏定义配置。
4.2、添加文件
这一步主要是参考mx6ullevk开发板在源码中添加自己的开发板文件
-
添加配置文件
cp configs/mx6ull_14x14_evk_emmc_defconfig configs/mx6ull_14x14_topeet_emmc_defconfigcp include/configs/mx6ullevk.h include/configs/mx6ull_topeet.h -
添加开发板文件夹
cp -r board/freescale/mx6ullevk/ board/freescale/mx6ull_topeet/更改文件名:
mv board/freescale/mx6ull_topeet/mx6ullevk.c board/freescale/mx6ull_topeet/mx6ull_topeet.c -
添加设备树文件
新版本uboot更多的参考了Linux内核引入了设备树和驱动模型(Driver Model)。所以移植内容就更多的是设备树文件的修改。
-
imx6ull-14x14-topeet-emmc.dts文件:添加:
cp arch/arm/dts/imx6ull-14x14-evk-emmc.dts arch/arm/dts/imx6ull-14x14-topeet-emmc.dts修改:
#include "imx6ull-14x14-evk.dts" 改为 #include "imx6ull-14x14-topeet.dts" -
imx6ull-14x14-topeet.dts文件:添加
cp arch/arm/dts/imx6ull-14x14-evk.dts arch/arm/dts/imx6ull-14x14-topeet.dts修改:
#include "imx6ul-14x14-evk.dtsi" #include "imx6ul-14x14-evk-u-boot.dtsi" 改为 #include "imx6ul-14x14-topeet.dtsi" #include "imx6ul-14x14-topeet-u-boot.dtsi" -
添加
imx6ul-14x14-topeet.dtsi和imx6ul-14x14-topeet-u-boot.dtsi文件cp arch/arm/dts/imx6ul-14x14-evk.dtsi arch/arm/dts/imx6ul-14x14-topeet.dtsicp arch/arm/dts/imx6ul-14x14-evk-u-boot.dtsi arch/arm/dts/imx6ul-14x14-topeet-u-boot.dtsi
-
4.3、修改文件
4.3.1、mx6ull_14x14_topeet_emmc_defconfig文件
-
第一处(目标板)
CONFIG_TARGET_MX6ULL_14X14_EVK=y 改为 CONFIG_TARGET_MX6ULL_14X14_TOPEET=y -
第二处(imximage配置文件)
CONFIG_SYS_EXTRA_OPTIONS="IMX_CONFIG=board/freescale/mx6ullevk/imximage.cfg" 改为 CONFIG_SYS_EXTRA_OPTIONS="IMX_CONFIG=board/freescale/mx6ull_topeet/imximage.cfg" -
第三处(设备树)
CONFIG_DEFAULT_DEVICE_TREE="imx6ull-14x14-evk-emmc" 改为 CONFIG_DEFAULT_DEVICE_TREE="imx6ull-14x14-topeet-emmc" -
第四处(74lv595相关,自己的开发板没有该芯片)
CONFIG_DM_74X164=y 改为 # CONFIG_DM_74X164 is not set CONFIG_SOFT_SPI=y 改为 # CONFIG_SOFT_SPI is not set
4.3.2、mx6ull_topeet.h文件修改
添加自己开发板的内容,修改如下:
"findfdt="\
"if test $fdt_file = undefined; then " \
"if test $board_name = ULZ-EVK && test $board_rev = 14X14; then " \
"setenv fdt_file imx6ulz-14x14-evk.dtb; fi; " \
"if test $board_name = EVK && test $board_rev = 9X9; then " \
"setenv fdt_file imx6ull-9x9-evk.dtb; fi; " \
"if test $board_name = EVK && test $board_rev = 14X14; then " \
"setenv fdt_file imx6ull-14x14-evk.dtb; fi; " \
"if test $board_name = TOPEET && test $board_rev = 14X14; then " \
"setenv fdt_file imx6ull-14x14-topeet.dtb; fi; " \
"if test $fdt_file = undefined; then " \
"echo WARNING: Could not determine dtb to use; " \
"fi; " \
"fi;\0" \
"findtee="\
"if test $tee_file = undefined; then " \
"if test $board_name = ULZ-EVK && test $board_rev = 14X14; then " \
"setenv tee_file uTee-6ulzevk; fi; " \
"if test $board_name = EVK && test $board_rev = 9X9; then " \
"setenv tee_file uTee-6ullevk; fi; " \
"if test $board_name = EVK && test $board_rev = 14X14; then " \
"setenv tee_file uTee-6ullevk; fi; " \
"if test $board_name = TOPEET && test $board_rev = 14X14; then " \
"setenv tee_file uTee-6ull_topeet; fi; " \
"if test $tee_file = undefined; then " \
"echo WARNING: Could not determine tee to use; " \
"fi; " \
"fi;\0" \
4.3.3、mx6ull_topeet文件夹
-
Kconfig文件修改如下(最后endif之后务必添加换行)if TARGET_MX6ULL_14X14_TOPEET config SYS_BOARD default "mx6ull_topeet" config SYS_VENDOR default "freescale" config SYS_CONFIG_NAME default "mx6ull_topeet" config SYS_TEXT_BASE default 0x87800000 endif -
Makefile文件修改如下obj-y := mx6ull_topeet.o -
由于
CONFIG_USE_IMXIMG_PLUGIN没有使能,所以imximage_lpddr2.cfg文件和和imximage.cfg无需修改。否则改动如下PLUGIN board/freescale/mx6ullevk/plugin.bin 0x00907000 改为 PLUGIN board/freescale/mx6ull_topeet/plugin.bin 0x00907000 -
mx6ull_topeet.c文件修改-
LCD电源引脚
static iomux_v3_cfg_t const lcd_pads[] = { /* Use GPIO for Brightness adjustment, duty cycle = period. */ MX6_PAD_GPIO1_IO08__GPIO1_IO08 | MUX_PAD_CTRL(NO_PAD_CTRL), /* Used for LCD power control*/ MX6_PAD_LCD_DATA08__GPIO3_IO13 | MUX_PAD_CTRL(NO_PAD_CTRL), }; static int setup_lcd(void) { enable_lcdif_clock(LCDIF1_BASE_ADDR, 1); imx_iomux_v3_setup_multiple_pads(lcd_pads, ARRAY_SIZE(lcd_pads)); /* Power on the LCD */ gpio_request(IMX_GPIO_NR(3, 13), "lcd power"); gpio_direction_output(IMX_GPIO_NR(3, 13) , 1); /* Reset the LCD */ gpio_request(IMX_GPIO_NR(5, 9), "lcd reset"); gpio_direction_output(IMX_GPIO_NR(5, 9) , 0); udelay(500); gpio_direction_output(IMX_GPIO_NR(5, 9) , 1); /* Set Brightness to high */ gpio_request(IMX_GPIO_NR(1, 8), "backlight"); gpio_direction_output(IMX_GPIO_NR(1, 8) , 1); return 0; } -
输出信息修改
int board_late_init(void) { #ifdef CONFIG_CMD_BMODE add_board_boot_modes(board_boot_modes); #endif env_set("tee", "no"); #ifdef CONFIG_IMX_OPTEE env_set("tee", "yes"); #endif #ifdef CONFIG_ENV_VARS_UBOOT_RUNTIME_CONFIG env_set("board_name", "TOPEET"); if (is_mx6ull_9x9_evk()) env_set("board_rev", "9X9"); else env_set("board_rev", "14X14"); if (is_cpu_type(MXC_CPU_MX6ULZ)) { env_set("board_name", "ULZ-EVK"); env_set("usb_net_cmd", "usb start"); } #endif setup_lcd(); #ifdef CONFIG_ENV_IS_IN_MMC board_late_mmc_env_init(); #endif set_wdog_reset((struct wdog_regs *)WDOG1_BASE_ADDR); return 0; } int checkboard(void) { if (is_mx6ull_9x9_evk()) puts("Board: MX6ULL 9x9 EVK\n"); else if (is_cpu_type(MXC_CPU_MX6ULZ)) puts("Board: MX6ULZ 14x14 EVK\n"); else puts("Board: MX6ULL 14x14 TOPEET\n"); return 0; }
-
4.3.4、设备树
-
imx6ull-14x14-topeet.dts文件model = "i.MX6 ULL 14x14 EVK Board"; compatible = "fsl,imx6ull-14x14-evk", "fsl,imx6ull"; 改为 model = "i.MX6 ULL 14x14 TOPEET Board"; compatible = "fsl,imx6ull-14x14-topeet", "fsl,imx6ull"; -
imx6ul-14x14-topeet.dtsi文件1.官方evk开发板使用了一颗扩展IO的芯片
74lv595,手上的开发板没有该芯片,所以需要去掉该芯片相关内容。屏蔽或删除以下内容:aliases { /* spi5 = &{/spi4}; */ }; /* reg_can_3v3: regulator-can-3v3 { compatible = "regulator-fixed"; regulator-name = "can-3v3"; regulator-min-microvolt = <3300000>; regulator-max-microvolt = <3300000>; gpios = <&gpio_spi 3 GPIO_ACTIVE_LOW>; }; */ /* spi4 { compatible = "spi-gpio"; pinctrl-names = "default"; pinctrl-0 = <&pinctrl_spi4>; status = "okay"; pinctrl-assert-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>; gpio-sck = <&gpio5 11 0>; gpio-mosi = <&gpio5 10 0>; cs-gpios = <&gpio5 7 0>; num-chipselects = <1>; #address-cells = <1>; #size-cells = <0>; gpio_spi: gpio@0 { compatible = "fairchild,74hc595"; gpio-controller; #gpio-cells = <2>; reg = <0>; registers-number = <1>; registers-default = /bits/ 8 <0x57>; spi-max-frequency = <100000>; }; }; */ &can1 { pinctrl-names = "default"; pinctrl-0 = <&pinctrl_flexcan1>; /* xceiver-supply = <®_can_3v3>; */ status = "okay"; }; &can2 { pinctrl-names = "default"; pinctrl-0 = <&pinctrl_flexcan2>; /* xceiver-supply = <®_can_3v3>; */ status = "okay"; }; /* pinctrl_spi4: spi4grp { fsl,pins = < MX6UL_PAD_BOOT_MODE0__GPIO5_IO10 0x70a1 MX6UL_PAD_BOOT_MODE1__GPIO5_IO11 0x70a1 MX6UL_PAD_SNVS_TAMPER7__GPIO5_IO07 0x70a1 MX6UL_PAD_SNVS_TAMPER8__GPIO5_IO08 0x80000000 >; }; */
-
LCD修改。手上的开发板使用的是1024x600的rgb液晶屏,主要修改
display-timings以及电源引脚
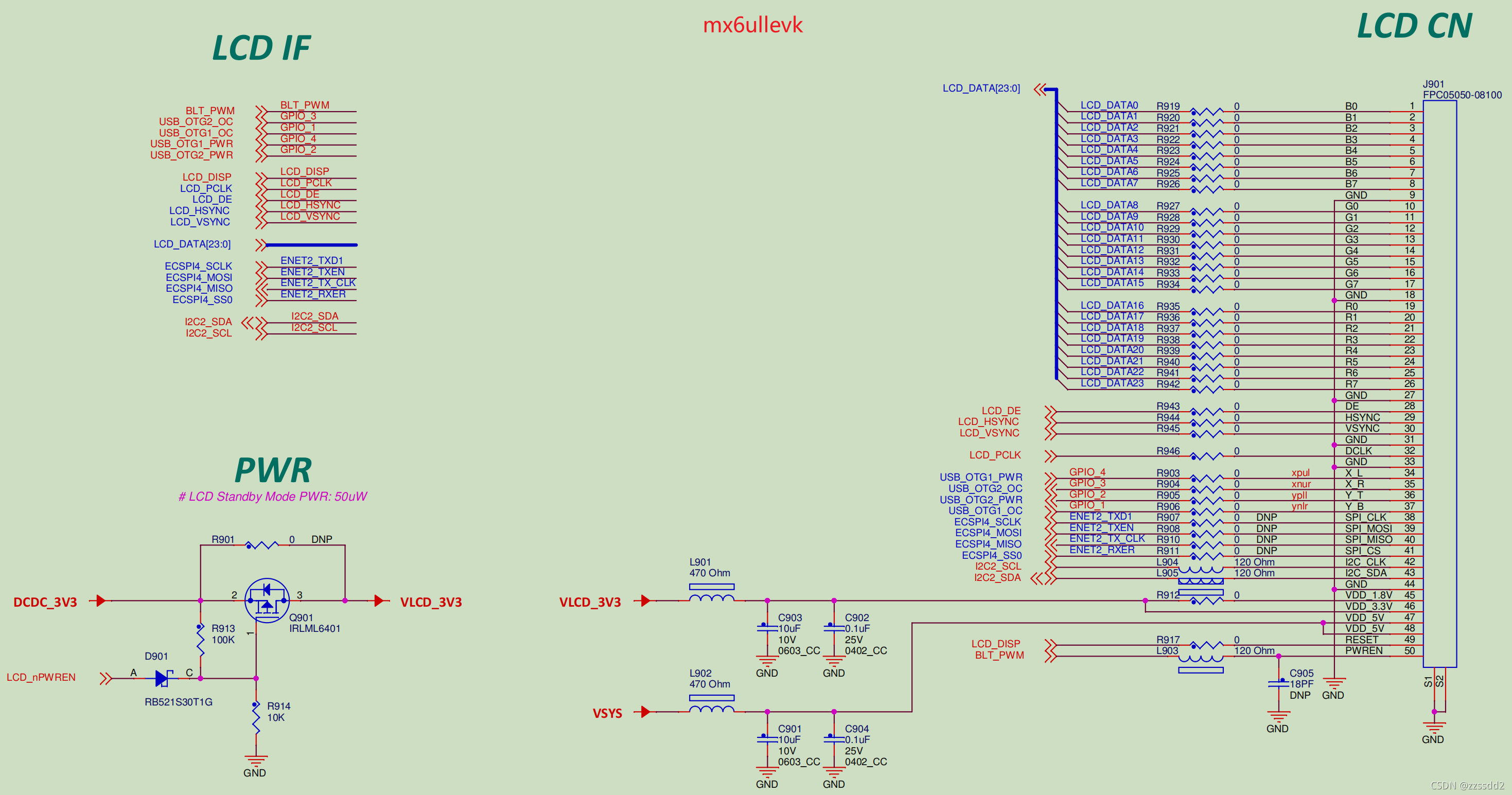
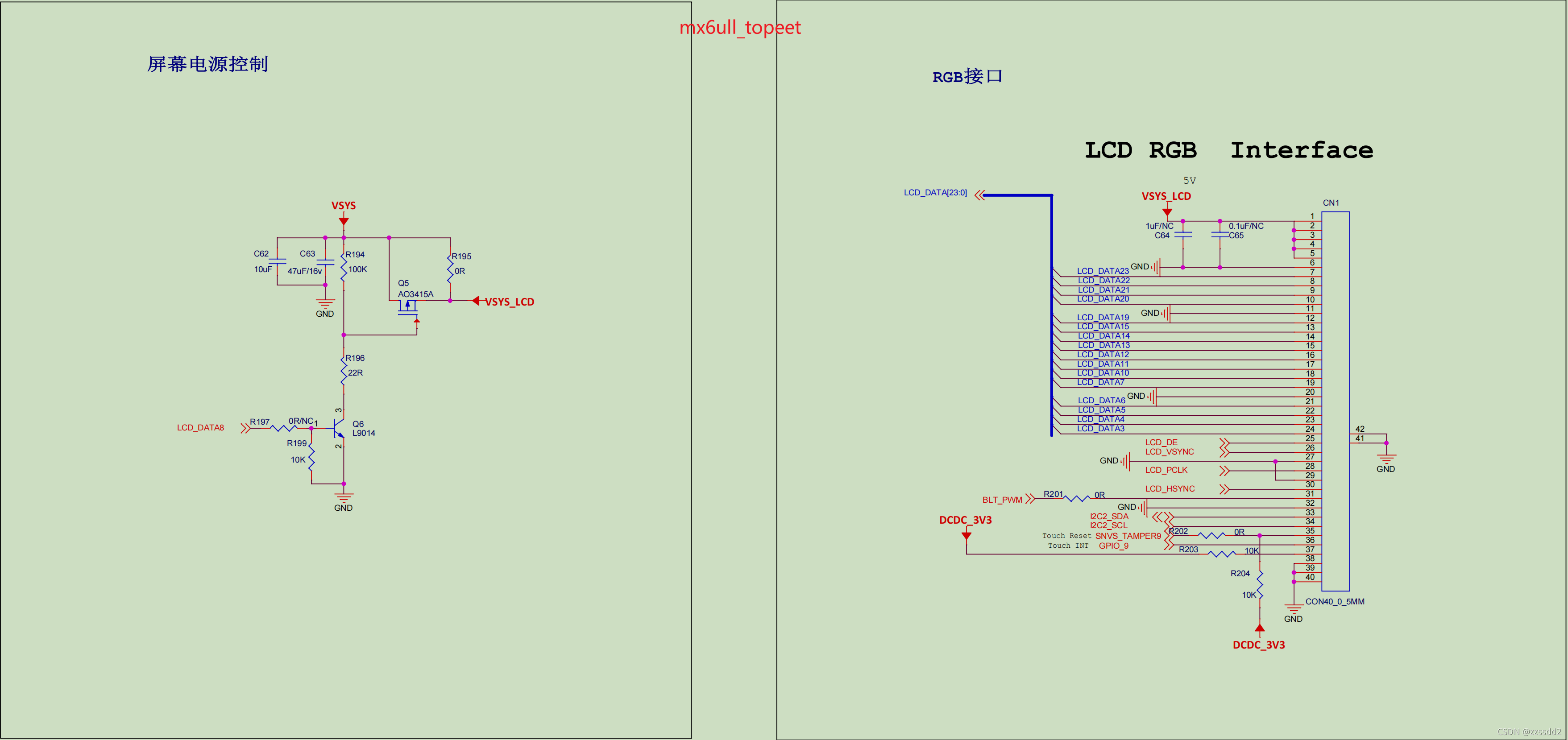
pinctrl_lcdif_dat修改:pinctrl_lcdif_dat: lcdifdatgrp { fsl,pins = < /* MX6UL_PAD_LCD_DATA00__LCDIF_DATA00 0x79 MX6UL_PAD_LCD_DATA01__LCDIF_DATA01 0x79 MX6UL_PAD_LCD_DATA02__LCDIF_DATA02 0x79 */ MX6UL_PAD_LCD_DATA03__LCDIF_DATA03 0x79 MX6UL_PAD_LCD_DATA04__LCDIF_DATA04 0x79 MX6UL_PAD_LCD_DATA05__LCDIF_DATA05 0x79 MX6UL_PAD_LCD_DATA06__LCDIF_DATA06 0x79 MX6UL_PAD_LCD_DATA07__LCDIF_DATA07 0x79 /* MX6UL_PAD_LCD_DATA08__LCDIF_DATA08 0x79 MX6UL_PAD_LCD_DATA09__LCDIF_DATA09 0x79 */ MX6UL_PAD_LCD_DATA10__LCDIF_DATA10 0x79 MX6UL_PAD_LCD_DATA11__LCDIF_DATA11 0x79 MX6UL_PAD_LCD_DATA12__LCDIF_DATA12 0x79 MX6UL_PAD_LCD_DATA13__LCDIF_DATA13 0x79 MX6UL_PAD_LCD_DATA14__LCDIF_DATA14 0x79 MX6UL_PAD_LCD_DATA15__LCDIF_DATA15 0x79 /* MX6UL_PAD_LCD_DATA16__LCDIF_DATA16 0x79 MX6UL_PAD_LCD_DATA17__LCDIF_DATA17 0x79 MX6UL_PAD_LCD_DATA18__LCDIF_DATA18 0x79 */ MX6UL_PAD_LCD_DATA19__LCDIF_DATA19 0x79 MX6UL_PAD_LCD_DATA20__LCDIF_DATA20 0x79 MX6UL_PAD_LCD_DATA21__LCDIF_DATA21 0x79 MX6UL_PAD_LCD_DATA22__LCDIF_DATA22 0x79 MX6UL_PAD_LCD_DATA23__LCDIF_DATA23 0x79 >; };pinctrl_lcdif_ctrl修改:pinctrl_lcdif_ctrl: lcdifctrlgrp { fsl,pins = < MX6UL_PAD_LCD_CLK__LCDIF_CLK 0x79 MX6UL_PAD_LCD_ENABLE__LCDIF_ENABLE 0x79 MX6UL_PAD_LCD_HSYNC__LCDIF_HSYNC 0x79 MX6UL_PAD_LCD_VSYNC__LCDIF_VSYNC 0x79 /* used for lcd reset */ MX6UL_PAD_SNVS_TAMPER9__GPIO5_IO09 0x79 /* used for lcd power*/ MX6UL_PAD_LCD_DATA08__GPIO3_IO13 0x79 >; };display-timings修改:&lcdif { pinctrl-names = "default"; pinctrl-0 = <&pinctrl_lcdif_dat &pinctrl_lcdif_ctrl>; display = <&display0>; status = "okay"; display0: display@0 { bits-per-pixel = <24>; bus-width = <24>; display-timings { native-mode = <&timing0>; timing0: timing0 { clock-frequency = <51200000>; hactive = <1024>; vactive = <600>; hfront-porch = <160>; hback-porch = <140>; hsync-len = <20>; vback-porch = <20>; vfront-porch = <12>; vsync-len = <3>; hsync-active = <0>; vsync-active = <0>; de-active = <1>; pixelclk-active = <0>; }; }; }; };关于display-timings的说明可以参考uboot源码下的该文档:
doc/device-tree-bindings/video/display-timing.txt -
网络芯片修改。手上开发板使用的网络芯片与官方板同款
KSZ8081,除了复位引脚不同外其他一样,官方开发板是通过74lv595扩展IO控制复位引脚。修改如下:&fec2 { pinctrl-names = "default"; pinctrl-0 = <&pinctrl_enet2>; phy-mode = "rmii"; phy-handle = <ðphy1>; status = "okay"; mdio { #address-cells = <1>; #size-cells = <0>; ethphy0: ethernet-phy@2 { reg = <2>; micrel,led-mode = <1>; clocks = <&clks IMX6UL_CLK_ENET_REF>; clock-names = "rmii-ref"; phy-reset-gpios = <&gpio5 7 GPIO_ACTIVE_LOW>; phy-reset-duration = <10>; phy-reset-post-delay = <10>; }; ethphy1: ethernet-phy@1 { reg = <1>; micrel,led-mode = <1>; clocks = <&clks IMX6UL_CLK_ENET2_REF>; clock-names = "rmii-ref"; phy-reset-gpios = <&gpio5 8 GPIO_ACTIVE_LOW>; phy-reset-duration = <10>; phy-reset-post-delay = <10>; }; }; };phy-reset-gpios、phy-reset-duration、phy-reset-post-delay参数在文件drivers/net/fec_mxc.c中用到。 -
修改设备树Makefile文件
arch/arm/dts/Makefile,添加自己的开发板。dtb-$(CONFIG_MX6ULL) += \ imx6ull-14x14-ddr3-val.dtb \ imx6ull-14x14-ddr3-val-epdc.dtb \ imx6ull-14x14-ddr3-val-emmc.dtb \ imx6ull-14x14-ddr3-val-gpmi-weim.dtb \ imx6ull-14x14-ddr3-val-tsc.dtb \ imx6ull-14x14-evk.dtb \ imx6ull-14x14-evk-emmc.dtb \ imx6ull-14x14-topeet-emmc.dtb \ imx6ull-14x14-evk-gpmi-weim.dtb \ imx6ull-9x9-evk.dtb \ imx6ull-colibri.dtb \ imx6ull-phytec-segin-ff-rdk-emmc.dtb \ imx6ull-dart-6ul.dtb \ imx6ull-somlabs-visionsom.dtb \ imx6ulz-14x14-evk.dtb \ imx6ulz-14x14-evk-emmc.dtb \ imx6ulz-14x14-evk-gpmi-weim.dtb
4.3.5、其他修改
arch/arm/mach-imx/mx6/Kconfig文件修改:
添加自己开发板平台
config TARGET_MX6ULL_14X14_TOPEET
bool "Support mx6ull_14x14_topeet"
select BOARD_LATE_INIT
select DM
select DM_THERMAL
select MX6ULL
imply CMD_DM
添加自己的开发板Kconfig文件
source "board/freescale/mx6ull_topeet/Kconfig"
五、编译启动
-
修改
make.sh文件make mx6ull_14x14_evk_emmc_defconfig 改为 make mx6ull_14x14_topeet_emmc_defconfig执行
./make.sh等待编译完成。 -
烧录至SD卡
sudo dd if=u-boot-dtb.imx of=/dev/sdb bs=1K seek=1 && sync编译完成后使用上述命令将uboot固件烧录至SD卡,
sdb是我的SD卡挂载到Ubuntu下的名字,可以通过命令ls /dev/sd*查看挂载了哪些设备来确定烧录对象。 -
启动开发板
开发板拨码开关对应启动方式:
1 2 3 4 5 6 7 8 启动设备 0 1 - - - - - - 串行下载(USB _OTG烧写镜像) 1 0 0 0 0 0 1 0 SD 卡启动 1 0 1 0 0 1 1 0 EMMC 启动 1 0 0 0 1 0 0 1 NAND FLASH 启动
六、其他
6.1、endif错误
board/freescale/mx6ull_topeet/Kconfig:14: 'endif' in different file than 'if'
board/freescale/mx6ull_topeet/Kconfig:3: location of the 'if'
arch/arm/mach-imx/mx6/Kconfig:913: 'endif' in different file than 'if'
board/freescale/mx6ull_topeet/Kconfig:3: location of the 'if'
arch/arm/Kconfig:1893: 'endmenu' in different file than 'menu'
board/freescale/mx6ull_topeet/Kconfig:3: location of the 'menu'
make[1]: *** [scripts/kconfig/Makefile:128:mx6ull_14x14_topeet_emmc_defconfig] 错误 1
make: *** [Makefile:539:mx6ull_14x14_topeet_emmc_defconfig] 错误 2
scripts/kconfig/conf --syncconfig Kconfig
board/freescale/mx6ull_topeet/Kconfig:14: 'endif' in different file than 'if'
board/freescale/mx6ull_topeet/Kconfig:3: location of the 'if'
arch/arm/mach-imx/mx6/Kconfig:913: 'endif' in different file than 'if'
board/freescale/mx6ull_topeet/Kconfig:3: location of the 'if'
arch/arm/Kconfig:1893: 'endmenu' in different file than 'menu'
board/freescale/mx6ull_topeet/Kconfig:3: location of the 'menu'
make[2]: *** [scripts/kconfig/Makefile:47:syncconfig] 错误 1
make[1]: *** [Makefile:539:syncconfig] 错误 2
make: *** 没有规则可制作目标“include/config/auto.conf”,由“include/config/uboot.release” 需求。 停止。
出现该错误的原因是因为我在修改board/freescale/mx6ull_topeet/Kconfig文件时没有在文件最后endif之后添加换行,在该文件最后敲个换行即可解决。
6.2、Net Error错误
U-Boot 2020.04-00001-g44f5949dd9-dirty (Oct 17 2021 - 19:25:28 +0800)
CPU: i.MX6ULL rev1.1 792 MHz (running at 396 MHz)
CPU: Industrial temperature grade (-40C to 105C) at 37C
Reset cause: POR
Model: i.MX6 ULL 14x14 TOPEET Board
Board: MX6ULL 14x14 TOPEET
DRAM: 512 MiB
MMC: FSL_SDHC: 0, FSL_SDHC: 1
Loading Environment from MMC... *** Warning - bad CRC, using default environment
[*]-Video Link 0 (1024 x 600)
[0] lcdif@21c8000, video
In: serial
Out: serial
Err: serial
switch to partitions #0, OK
mmc0 is current device
flash target is MMC:0
Net:
Error: ethernet@20b4000 address not set.
Error: ethernet@20b4000 address not set.
Error: ethernet@20b4000 address not set.
FEC: can't find phy-handle
Error: ethernet@20b4000 address not set.
Could not get PHY for FEC0: addr 2
Error: ethernet@20b4000 address not set.
FEC: can't find phy-handle
Error: ethernet@20b4000 address not set.
Could not get PHY for FEC0: addr 2
No ethernet found.
若uboot启动后终端输出如上错误信息,有两种解决方案:
方案一:
在文件configs/mx6ull_14x14_topeet_emmc_defconfig添加以下内容使能uboot给网卡分配随机MAC地址的功能,然后重新编译后烧录启动
CONFIG_NET_RANDOM_ETHADDR=y
使能随机分配MAC功能后结果:
U-Boot 2020.04-00001-g44f5949dd9-dirty (Oct 17 2021 - 21:57:35 +0800)
CPU: i.MX6ULL rev1.1 792 MHz (running at 396 MHz)
CPU: Industrial temperature grade (-40C to 105C) at 36C
Reset cause: POR
Model: i.MX6 ULL 14x14 TOPEET Board
Board: MX6ULL 14x14 TOPEET
DRAM: 512 MiB
MMC: FSL_SDHC: 0, FSL_SDHC: 1
Loading Environment from MMC... *** Warning - bad CRC, using default environment
[*]-Video Link 0 (1024 x 600)
[0] lcdif@21c8000, video
In: serial
Out: serial
Err: serial
switch to partitions #0, OK
mmc0 is current device
flash target is MMC:0
Net:
Warning: ethernet@20b4000 (eth1) using random MAC address - 5a:49:f1:d9:07:cd
eth1: ethernet@20b4000 [PRIME]Get shared mii bus on ethernet@2188000
Warning: ethernet@2188000 (eth0) using random MAC address - ca:85:77:84:17:ae
, eth0: ethernet@2188000
方案二:
在终端中使用以下命令设置MAC地址
# 设置网卡1
setenv ethaddr ca:38:29:c3:28:30
# 设置网卡2
setenv eth1addr 76:7d:33:a8:f0:e7
# 保存
saveenv
# 重启
reset
重启后输出结果:
U-Boot 2020.04-00001-g44f5949dd9-dirty (Oct 17 2021 - 22:03:25 +0800)
CPU: i.MX6ULL rev1.1 792 MHz (running at 396 MHz)
CPU: Industrial temperature grade (-40C to 105C) at 45C
Reset cause: POR
Model: i.MX6 ULL 14x14 TOPEET Board
Board: MX6ULL 14x14 TOPEET
DRAM: 512 MiB
MMC: FSL_SDHC: 0, FSL_SDHC: 1
Loading Environment from MMC... OK
[*]-Video Link 0 (1024 x 600)
[0] lcdif@21c8000, video
In: serial
Out: serial
Err: serial
switch to partitions #0, OK
mmc0 is current device
flash target is MMC:0
Net: eth1: ethernet@20b4000 [PRIME]Get shared mii bus on ethernet@2188000
, eth0: ethernet@2188000