<LinuxПЊЗЂ>ЈCЧ§ЖЏПЊЗЂ-- зжЗћЩшБИЧ§ЖЏ(5) Й§ГЬЯъЯИМЧТМ
Ч§ЖЏПЊЗЂЪЧНЈСЂдйЯЕЭГжЎЩЯЕФ,ЧАУцзїепвВМЧТМСЫЯЕЭГвЦжВЕФЙ§ГЬМЧТМ,ШчЙћгааЫШЄ,ПЩНјШыВЉжїЕФжївГВщПДЯрЙиЮФеТ,етРяОЭВЛЬэМгСДНгСЫЁЃ
ЦфЫќИїЧ§ЖЏПЩЕНВЉжїжївГВщПД,гЩгкКѓајЛсгадНРДдНЖрЕФЦЊЗљ,ОЭВЛвЛвЛСаОйСДНгЕНЮФеТжаСЫЁЃ
Ек1ЁЂ2 СНЦЊЪЧОЩАцзжЗћЧ§ЖЏЕФПЊЗЂЗНЪН,Ек3ЦЊЪЧаТзжЗћЩшБИЧ§ЖЏЕФПЊЗЂЪЕбщ,Ек4ЦЊЪЧЛљгкЩшБИЪїЯТЕФЪЕбщ,НгЯТРДетЦЊ,ЪЧЛљгкpinctrlзгЯЕЭГКЭGPIOзгЯЕЭГНјааЧ§ЖЏПЊЗЂЕФЗНЪНЁЃзгЯЕЭГЯрЙиНщЩм,ПЩВщПДЪжВс,ЛђАйЖШВщдФЯрЙизЪСЯЁЃ
ЪЕбщЙ§ГЬМЧТМШчЯТ:
вЛЁЂБрГЬЛЗОГзМБИ
1ЁЂАВзАащФтЛњubuntu,вдМАНЛВцЙЄОпСД,етИідкНВНтЯЕЭГвЦжВВПЗжвВгаЫЕЕН,ЪЧБиаыЕФ;
2ЁЂФкКЫдДТы,етИівВЪЧЯЕЭГвЦжВжагУЕНЕФФкКЫдДТы,БрвыЧ§ЖЏЪБЪЙгУЕФФкКЫдДТы,вЊгыПЊЗЂАхдЫааЕФФкКЫдДТыБЃДцЭЌвЛИіАцБО;
3ЁЂБрГЬШэМўVScode;
4ЁЂАВзАНЛВцЙЄОпСД;
ЖўЁЂОпЬхБрГЬЙ§ГЬ
1ЁЂЩшБИЪїаоИФ
(1)ЬэМгLEDЕФpinctrlНкЕу
ДђПЊЁА/arch/arm/boot/dts/imx6ull-onefu-emmc.dtsЁБ,дкiomuxcНкЕуЕФimxul-evkзгНкЕуЯТДДНЈвЛИіУћЮЊЁАpinctrl_ledЁБЕФзгНкЕу,НкЕуШчЯТ:
pinctrl_led:ledgrp {
fsl,pin = <
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0x10B0 /*LED0: ЕквЛИіВЮЪ§:ИДгУЮЊGPIO1_IO03, 0x10B0:ХфжУGPIOЕчЦјЪєад*/
>
};
(2)ЬэМгLEDЩшБИНкЕу
ДђПЊЁА/arch/arm/boot/dts/imx6ull-onefu-emmc.dtsЁБ,дкЁА/ЁБИљНкЕуЯТДДНЈвЛИіУћЮЊЁАgpioledЁБЕФзгНкЕу,НкЕуШчЯТ:
gpioled {
#address-cells = <1>; //БэЪО reg ЪєаджаЦ№ЪМЕижЗеМгУвЛИізжГЄ
#size-cells = <1>; //ЕижЗГЄЖШвВеМгУвЛИізжГЄ
compatible = "onefu-gpioled"; //ЩшжУ onefuled НкЕуМцШнадЮЊЁАonefu-gpioledЁБЁЃ
pinctrl-names = "default"; //ЩшжУpinctrlУћГЦФЌШЯ
pinctrl-0 = <&pinctrl_led>; //pinctrl-0 ЪєадЩшжУ LED ЕЦЫљЪЙгУЕФ PIN ЖдгІЕФ pinctrl НкЕу
led-gpio = <&gpio1 3 GPIO_ACTIVE_LOW>;//жИЖЈЪЙгУGPIO1_IO03,гааЇЕчЦНЪБЕЭЕчЦН
status = "okay"; //ЩшжУзДЬЌЮЊЁАokayЁБЁЃ
};
(3)аоИФPINжиИДЪЙгУЕФЕиЗН
ЗЧГЃживЊЁ
гЩгкЭЌвЛИіIO,дйЖрИіНкЕуЭЌЪБЪЙгУВЛЭЌЙІФм,ОЭЛсЕМжТвьГЃЁЃ
МьВщPINгаУЛгаБЛЦфЫќЭтЩшЪЙгУАќРЈвЛЯТСНИіЗНУц:
1)МьВщpinctrlЩшжУ;
2)ШчЙћетИіPINХфжУЮЊGPIOЕФЛА,МьВщетИіGPIOгаУЛгаБЛБ№ЕФЭтЩшЪЙгУ;
БОЪЕбщШчЯТаоИФ:
дкЁА/arch/arm/boot/dts/imx6ull-onefu-emmc.dtsЁБЮФМўФкЫбЫїЁАGPIO1_IO03ЁБ,ВщЕНЁАpinctrl_tscЁБНкЕу,аоИФКѓШчЯТ:
pinctrl_tsc: tscgrp {
fsl,pins = <
/*
MX6UL_PAD_GPIO1_IO01__GPIO1_IO01 0xb0
MX6UL_PAD_GPIO1_IO02__GPIO1_IO02 0xb0
MX6UL_PAD_GPIO1_IO03__GPIO1_IO03 0xb0
MX6UL_PAD_GPIO1_IO04__GPIO1_IO04 0xb0*/
>;
};
pinctrl_tsc НкЕуЪЧ TSC(ЕчзшДЅУўЦСНгПк)ЕФ pinctrl НкЕу,ДгЕк 484 ааПЩвдПДГі,ФЌШЯЧщПіЯТGPIO1_IO03 зїЮЊСЫ TSC ЭтЩшЕФ PINЁЃЫљвдЦСБЮЕє,гЩгкдзгЕФПЊЗЂАхУЛгаЪЙгУTSCНгПк,ЫљвдПЩШЋВПв§НХЖМЦСБЮЕєЁЃ
дкЁА/arch/arm/boot/dts/imx6ull-onefu-emmc.dtsЁБЮФМўФкЫбЫїЁАgpio1 3ЁБ,ВщЕНЁАtscЁБНкЕу,аоИФКѓШчЯТ:
&tsc {
pinctrl-names = "default";
pinctrl-0 = <&pinctrl_tsc>;
/*xnur-gpio = <&gpio1 3 GPIO_ACTIVE_LOW>;*/
measure-delay-time = <0xffff>;
pre-charge-time = <0xfff>;
status = "okay";
};
МЬајВщев,ЪЧЗёДцдкЪЙгУЯрЭЌPINЕФЕиЗН,ШчЙћга,дђЖМЦСБЮЁЃ
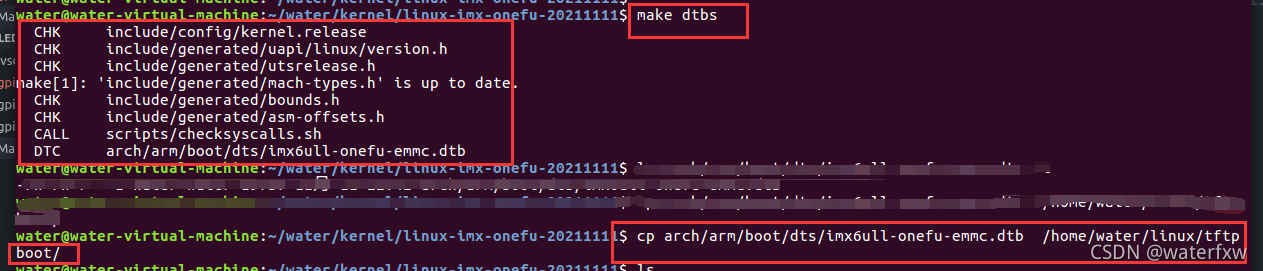
ЩшБИЪїБраДЭъГЩвдКѓЪЙгУЁАmake dtbsЁБУќСюжиаТБрвыЩшБИЪї,ШЛКѓЪЙгУаТБрвыГіРДЕФimx6ull-onefu-emmc.dtb ЮФМўЦєЖЏ Linux ЯЕЭГЁЃЦєЖЏГЩЙІвдКѓНјШыЁА/proc/device-treeЁБФПТМжаВщПДЁАgpioledЁБНкЕуЪЧЗёДцдк,ШчЙћДцдкЕФЛАОЭЫЕУїЩшБИЪїЛљБОаоИФГЩЙІ(ОпЬхЛЙвЊЧ§ЖЏбщжЄ),НсЙћШчЯТЭМЫљЪО:

2ЁЂvscodeЙЄГЬДДНЈзМБИ
(1)ДДНЈДцЗХдДТыЙЄГЬЕФФПТМ,Р§ШчЯТЭМзїепДДНЈЕФЮФМўМа;

2)ЪЙгУvscodeдк5-gpioledЮФМўМаФкДДНЈЙЄГЬ,ВЂаТНЈgpio.cКЭgpioApp.cЮФМў

(3)ЬэМгЭЗЮФМўТЗОЖ
вђЮЊЪЧБраДLinuxЧ§ЖЏ,вђДЫЛсгУЕНLinuxдДТыжаЕФКЏЪ§ЁЃЮвУЧашвЊдкVSCodeжаЬэМгLinuxдДТыжаЕФЭЗЮФМўТЗОЖЁЃДђПЊVSCode,АДЯТЁАCrtl+Shift+PЁБДђПЊVSCodeЕФПижЦЬЈ,ШЛКѓЪфШыЁАC/C++: Edit configurations(JSON) ЁБ,ДђПЊC/C++БрМХфжУЮФМў,ШчЯТЭМЫљЪО:

ДђПЊвдКѓЛсздЖЏдк.vscodeФПТМЯТЩњГЩвЛИіУћЮЊc_cpp_properties.jsonЕФЮФМў,ДЫЮФМўаоИФКѓФкШнШчЯТЫљЪО:

Ек7~9ааОЭЪЧЬэМгКУЕФLinuxЭЗЮФМўТЗОЖЁЃЗжБ№ЪЧПЊЗЂАхЫљЪЙгУЕФLinuxдДТыЯТЕФincludeЁЂarch/arm/includeКЭarch/arm/include/generatedетШ§ИіФПТМЕФТЗОЖ,зЂвт,етРяЪЙгУСЫОјЖдТЗОЖЁЃжївЊЪБЬэМгТЬЩЋПђФкЕФФкШн,МДЪЧФкКЫдДТыЕФТЗОЖ,КьЩЋПђдђЪЧдДТыЕФДцЗХФПТМ(ИљОнЖСепздМКЪЕМЪДцЗХЕФЮЛжУЬюаД),КѓУцНєНгзХЕФФкШн,ЖМЪЧвЛбљЕФСЫЁЃ
(4)аоИФLinuxФкКЫдДТыЖЅВуMakefileЮФМў(зїепвВЪЧПЊЗЂЪБВХВШетИіПгЕФ),НїМЧЁЂГ§ЗЧЯЕЭГвЦжВЕФЪБКђвбОаоИФСЫЁЃОпЬхШчЯТЭМЫљЪО:
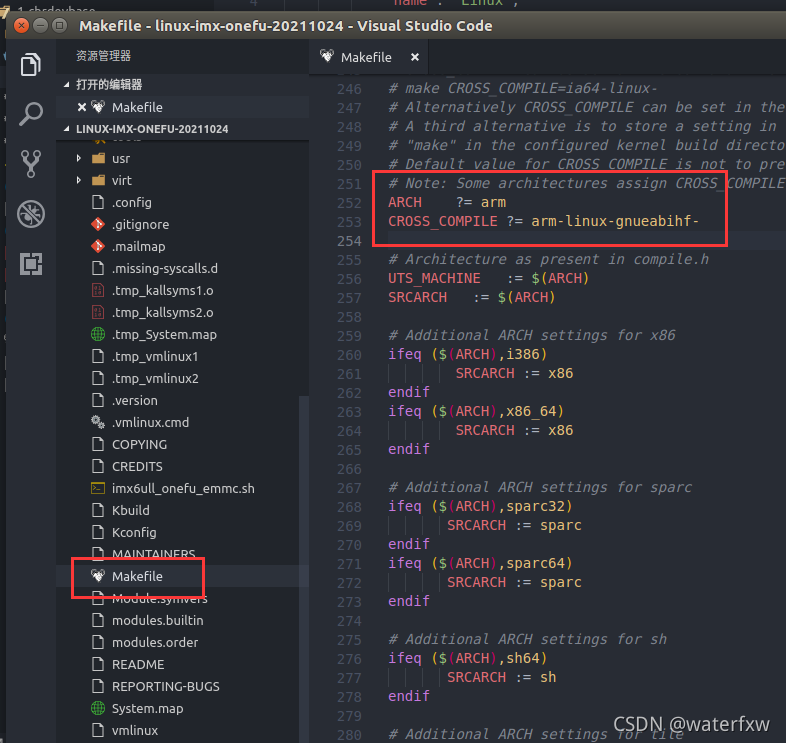
гУvscodeДђПЊФкКЫдДТыЕФЖЅВуФПТМ,ШЛКѓевЕНMakefile,дкРяУцевЕНЁАARCHЁБКЭЁАCROSS_COMPILEЁБетСНИіБфСП,ИќИФКѓБфГЩЁАARCH ?= armЁБКЭ ЁАCROSS_COMPILE ?= arm-linux-gnueabihf-ЁБ ,зЂвтааЕФФЉЮВВЛФмгаПеИё,ЗёдђБрвыЛсГіДэЁЃЕквЛИіЪЧБрвыЕФЖдЯѓ,ЕкЖўИіЪЧБрвыЕФЙЄОпСДЧАзКЁЃ
2ЁЂдкgpiorled.cжаБраДLEDзжЗћЧ§ЖЏдДТы,КЏЪ§ЕФзїгУЫЕУї,ЖМдкдДТызЂЪЭЩЯЫЕУї,ФкШнШчЯТ:
#include <linux/types.h>
#include <linux/kernel.h>
#include <linux/delay.h>
#include <linux/ide.h>
#include <linux/init.h>
#include <linux/module.h>
#include <linux/errno.h>
#include <linux/gpio.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/of.h>
#include <linux/of_address.h>
#include <linux/of_gpio.h>
#include <asm/mach/map.h>
#include <asm/uaccess.h>
#include <asm/io.h>
/***************************************************************
* Copyright ? onefu Co., Ltd. 2019-2021. All rights reserved.
* ЮФМўУћ : gpioled.c
* зїеп : water
* АцБО : V1.0
* УшЪі : led Ч§ЖЏЮФМўЁЃ
* ЦфЫћ : Юо
* ШежО : ГѕАцV1.0 2021/11/11 waterДДНЈ
* ***************************************************************/
#define GPIOLED_CNT 1 /*ЩшБИКХИіЪ§*/
#define GPIOLED_NAME "gpioled" /*ЩшБИУћзж*/
#define LEDOFF 0 /*ЙиЕЦ*/
#define LEDON 1 /*ПЊЕЦ*/
/*gpioled ЩшБИНсЙЙЬх*/
struct gpioled_dev{
dev_t devid; /*ЩшБИКХ*/
struct cdev cdev; /*cdev*/
struct class *class; /*Рр*/
struct device *device; /*ЩшБИ*/
int major; /*жїЩшБИКХ*/
int minor; /*ДЮЩшБИКХ*/
struct devuce_node *nd; /* ЩшБИНкЕу */
int led_gpio; /*ledЫљЪЙгУЕФGPIOБрКХ*/
};
struct gpioled_dev gpioled; /*ЖЈвх led ЩшБИ*/
/*
* @description : ДђПЊЩшБИ
* @param ЈC inode : ДЋЕнИјЧ§ЖЏЕФinode
* @param - filp : ЩшБИЮФМў,fileНсЙЙЬхгаИіНазіprivate_dataЕФГЩдББфСП
* вЛАудкopenЕФЪБКђНЋprivate_dataжИЯђЩшБИНсЙЙЬхЁЃ
* @return : 0 ГЩЙІ;ЦфЫћ ЪЇАм
*/
static int led_open(struct inode *inode, struct file *filp)
{
filp->private_data = &gpioled; /*НЋЩшБИЩшжУЮЊЫНгаЪ§Он*/
printk("gpio led open!\r\n"); /*жеЖЫЪфГіЬсЪО*/
return 0;
}
/*
*@description : ДгЩшБИЖСШЁЪ§Он
* @param - filp : вЊДђПЊЕФЩшБИЮФМў(ЮФМўУшЪіЗћ)
* @param - buf : ЗЕЛиИјгУЛЇПеМфЕФЪ§ОнЛКГхЧј
* @param - cnt : вЊЖСШЁЕФЪ§ОнГЄЖШ
* @param - offt : ЯрЖдгкЮФМўЪзЕижЗЕФЦЋвЦ
* @return : ЖСШЁЕФзжНкЪ§,ШчЙћЮЊИКжЕ,БэЪОЖСШЁЪЇАм
*/
static ssize_t led_read(struct file *filp, char __user *buf, size_t cnt, loff_t *offt)
{
printk("gpio led read !\r\n"); /*жеЖЫЪфГіЬсЪО*/
return 0;
}
/*
@description : ЯђЩшБИаДЪ§Он
@param - filp : ЩшБИЮФМў,БэЪОДђПЊЕФЮФМўУшЪіЗћ
@param - buf : вЊаДИјЩшБИаДШыЕФЪ§Он
@param - cnt : вЊаДШыЕФЪ§ОнГЄЖШ
@param - offt : ЯрЖдгкЮФМўЪзЕижЗЕФЦЋвЦ
@return : аДШыЕФзжНкЪ§,ШчЙћЮЊИКжЕ,БэЪОаДШыЪЇАм
*/
static ssize_t led_write(struct file *filp, const char __user *buf, size_t cnt, loff_t *offt)
{
int retvalue = 0;
unsigned char databuf[1];
unsigned char ledstat;
struct gpioled_dev *dev = filp->private_data; /*ЛёШЁЕНЩшБИЖдЯѓ*/
retvalue = copy_from_user(databuf, buf, cnt);/*НгЪегУЛЇПеМфДЋЕнИјФкКЫЕФЪ§Он*/
if(retvalue < 0){
printk("kernel write failed! \r\n"); /*жеЖЫЪфГіЬсЪО*/
return -EFAULT; /*ЗЕЛиДэЮѓ*/
}
ledstat = databuf[0]; /*НЋЖСШЁЕНЕФЪ§Он ИГжЕИјзДЬЌБфСП*/
if(ledstat == LEDON){ /*ХаЖЯзДЬЌБфСП ЮЊ ПЊЕЦ*/
gpio_set_value(dev->led_gpio, 0); /*ПЊЕЦ*/
}else if(ledstat == LEDOFF){ /*ХаЖЯзДЬЌБфСП ЮЊ ЙиЕЦ*/
gpio_set_value(dev->led_gpio, 1); /*ЙиЕЦ*/
}
return 0;
}
/*
*@description : ЙиБе/ЪЭЗХЩшБИ
*@param - filp : вЊЙиБеЕФЩшБИЮФМў(ЮФМўУшЪіЗћ)
*@return : 0 ГЩЙІ;ЦфЫћ ЪЇАм
*/
static int led_release(struct inode *inode, struct file *filp)
{
printk("dts led release ! \r\n");
return 0;
}
/*
*ЩшБИВйзїКЏЪ§НсЙЙЬх
*/
static struct file_operations gpioled_fops = {
.owner = THIS_MODULE,
.open = led_open,
.read = led_read,
.write = led_write,
.release = led_release,
};
/*
*@description : Ч§ЖЏШыПкКЏЪ§
*@param : Юо
*@return : 0 ГЩЙІ;ЦфЫћ ЪЇАм
*/
static int __init led_init(void)
{
int ret;
/*ЛёШЁЩшБИЪїжаЕФЪєадЪ§Он*/
/*1ЁЂЛёШЁЩшБИНкЕу:onefuled */
/**************************************************
* of_find_node_by_path :ИљОнТЗОЖ ЛёШЁЕН ЩшБИЪїНкЕу
* ВЮЪ§: [1]:жИЖЈзжЗћЩшБИЕФcdev
* [2]:ЩшБИЫљЪЙгУЕФЩшБИКХ
* [3]:ЬэМгЕФЪ§СП
**************************************************/
gpioled.nd = of_find_node_by_path("/gpioled");
if(dtsled.nd == NULL) {
printk("gpioled node can not found!\r\n");
return -EINVAL;
} else {
printk("gpioled node has been found !\r\n");
}
/*2ЁЂЛёШЁЩшБИЪїжаgpio Ъєад,ЕУЕНLEDЫљЪЙгУЕФgpioБрКХ*/
gpioled.led_gpio = of_get_named_gpio(gpioled.nd, "led-gpio",0);
if(gpioled.led_gpio <0) {
printk("Get LED GPIO failed !\r\n");
} else {
printk("led-gpio num = %d \r\n",gpioled.led_gpio);
}
/*3ЁЂЩшжУGPIO1_IO03ЮЊЪфГі,ВЂЧвЪфГіИпЕчЦН,ФЌШЯЙиБеLED*/
ret = gpio_direction_output(gpioled.led_gpio, 1);
if(ret < 0) {
printk("set GPIO failed!\r\n");
}
/* вдЯТЪБзЂВсзжЗћЩшБИЧ§ЖЏ*/
/* 1ЁЂДДНЈЩшБИКХ */
if(gpioled.major){ /*ШчЙћ ЖЈвхСЫ жїЩшБИКХ */
gpioled.devid = MKDEV(gpioled.major, 0); /* ИљОнжїЩшБИКХ ЕУЕН ЩшБИID */
register_chrdev_region(gpioled.devid, GPIOLED_CNT, GPIOLED_NAME); /* зЂВсЩшБИКХ*/
} else{ /*ШчЙћ УЛга ЖЈвх жїЩшБИКХ */
/**************************************************
* alloc_chrdev_region:гУвдЩъЧызжЗћЩшБИЩшБИКХ
* ВЮЪ§: [1]:жИЖЈашвЊЩъЧыЕФЩшБИ
* [2]:ДЮЩшБИКХ,вЛАуФЌШЯЮЊ 0
* [3]:ЩъЧыЕФЩшБИКХЕФЪ§СП
* [4]:ЩъЧыЕФЩшБИУћГЦ
**************************************************/
alloc_chrdev_region(&gpioled.devid, 0, GPIOLED_CNT, GPIOLED_NAME); /*ЩъЧыЩшБИКХ*/
gpioled.major = MAJOR(gpioled.devid); /*ЛёШЁжїЩшБИКХ */
gpioled.minor = MINOR(gpioled.devid); /*ЛёШЁДЮЩшБИКХ*/
}
printk("gpioled major=%d. minor=%d \r\n", gpioled.major, gpioled.minor); /*ЪфГіВщПДжїДЮЩшБИКХ*/
/* 2ЁЂГѕЪМЛЏcdev*/
gpioled.cdev.owner = THIS_MODULE; /*ФЃПщЫљЪє етИіФЃПщ*/
/**************************************************
* cdev_init :гУвдГѕЪМЛЏcdev
* ВЮЪ§: [1]:жИЖЈзжЗћЩшБИЕФcdev
* [2]:зжЗћЩшБИЮФМўВйзїКЏЪ§МЏКЯ
**************************************************/
cdev_init(&gpioled.cdev, &gpioled_fops);
/* 3ЁЂЬэМгвЛИіcdev*/
/**************************************************
* cdev_add :гУгкЯђ Linux ЯЕЭГЬэМгзжЗћЩшБИ(cdev НсЙЙЬхБфСП),
* ВЮЪ§: [1]:жИЖЈзжЗћЩшБИЕФcdev
* [2]:ЩшБИЫљЪЙгУЕФЩшБИКХ
* [3]:ЬэМгЕФЪ§СП
**************************************************/
cdev_add(&gpioled.cdev, gpioled.devid, GPIOLED_CNT);
/* 4ЁЂДДНЈРр*/
/**************************************************
* class_create :гУгкЯђ Linux ЯЕЭГЬэМгзжЗћЩшБИ(cdev НсЙЙЬхБфСП),
* ВЮЪ§: [1]:вЛАуЮЊ THIS_MODULE
* [2]:Ућзж
* ЗЕЛижЕ:жИЯђНсЙЙЬх class ЕФжИеы
**************************************************/
gpioled.class = class_create(THIS_MODULE, GPIOLED_NAME);
if(IS_ERR(gpioled.class)){ /*ХаЖЯДДНЈ Рр ГіДэ*/
return PTR_ERR(gpioled.class); /*ЗЕЛиДэЮѓаХЯЂ*/
}
/* 5ЁЂДДНЈЩшБИ ЪЕЯжздЖЏДДНЈЩшБИНкЕу */
/**************************************************
* device_create :гУгкЪЕЯжздЖЏДДНЈЩшБИНкЕу
* ВЮЪ§: [1]:жИЩшБИ ДДНЈЕН ФФИі Рр ЯТУц(гаЩЯвЛВНДДНЈЕФРржИЖЈ)
* [2]:жИЖЈИИЩшБИ,вЛАуЮЊNULLЁЃБэЪОУЛгаИИЩшБИ
* [3]:жИЖЈЩшБИКХ
* [4]:ЩшБИПЯФиИіЪЙгУЕФЪ§Он,вЛАуЮЊNULL
* [5]:ЩшБИУћГЦ,БэЪОдк/dev/ЯТЩњГЩЖдгІЕФЩшБИЮФМў
* ЗЕЛижЕ:жИЯђНсЙЙЬх class ЕФжИеы
**************************************************/
gpioled.device = device_create(gpioled.class, NULL, gpioled.devid, NULL, GPIOLED_NAME);
if(IS_ERR(gpioled.device)){ /*ХаЖЯДДНЈ ЩшБИ ГіДэ*/
return PTR_ERR(gpioled.device); /*ЗЕЛиДэЮѓаХЯЂ*/
}
return 0;
}
/*
* @description : Ч§ЖЏГіПкКЏЪ§
* @param : Юо
* @return : Юо
*/
static void __exit led_exit(void)
{
/*зЂЯњзжЗћЩшБИЧ§ЖЏ*/
/**************************************************
* cdev_del :гУвдДг Linux ФкКЫжаЩОГ§ЯргІЕФзжЗћЩшБИ
* ВЮЪ§: [1]:жИЖЈашвЊЩъЧыЕФЩшБИ
* [2]:ДЮЩшБИКХ,вЛАуФЌШЯЮЊ 0
**************************************************/
cdev_del(&gpioled.cdev); /*ЩОГ§cdev*/
/**************************************************
* unregister_chrdev_region :гУвдзЂЯњзжЗћЩшБИЩъЧыЕФЩшБИКХ
* ВЮЪ§: [1]:жИЖЈашвЊЩъЧыЕФЩшБИ
* [2]:ДЮЩшБИКХ,вЛАуФЌШЯЮЊ 0
**************************************************/
unregister_chrdev_region(gpioled.devid, GPIOLED_CNT); /*зЂЯњЩшБИ*/
/**************************************************
* device_destroy :ЩОГ§ЕєДДНЈЕФЩшБИ
* ВЮЪ§: [1]:ЩОГ§ЕФЩшБИЫљДІЕФРр
* [2]:ЩОГ§ЕФЩшБИКХ
**************************************************/
device_destroy(gpioled.class, gpioled.devid); /*ЩОГ§ЩшБИжаЕФРр*/
/**************************************************
* class_destroy :гУвдЩОГ§Рр
* ВЮЪ§: [1]:жИЖЈашвЊЩОГ§ЕФРр
**************************************************/
class_destroy(gpioled.class); /*ЩОГ§Рр*/
}
/*НЋЩЯУцСНИіКЏЪ§жИЖЈЮЊЧ§ЖЏШыПк КЭ ГіПк КЏЪ§*/
module_init(led_init);
module_exit(led_exit);
/*LICENSE КЭ зїепаХЯЂ ФЃПщУшЪіаХЯЂ ЩшБИжЇГжаХЯЂ*/
MODULE_LICENSE("GPL");
MODULE_AUTHOR("water");
MODULE_DESCRIPTION ("OnFu This is a GPIO LED ");
MODULE_SUPPORTED_DEVICE ("OneFu LED Device");
3ЁЂдкgpiorledApp.cЮФМўжаБраДВтЪдШэМўДњТы,ДњТыФкШнШчЯТ:
#include "stdio.h"
#include "unistd.h"
#include "sys/types.h"
#include "sys/stat.h"
#include "fcntl.h"
#include "stdlib.h"
#include "string.h"
/***************************************************************
* Copyright ? onefu Co., Ltd. 2019-2021. All rights reserved.
* ЮФМўУћ : gpioledApp.c
* зїеп : water
* АцБО : V1.0
* УшЪі : led Ч§ВтЪдAPPЁЃ
* ЦфЫћ : ЪЙгУЗНЗЈ:./gpioledApp /dev/led <1>|<2>
* argv[2] 0:ЙиБеLED
* argv[2] 1:ДђПЊLED
* ШежО : ГѕАцV1.0 2021/11/11 waterДДНЈ
* ***************************************************************/
#define LEDOFF 0
#define LEDON 1
/*
* @description : mainжїГЬађ
* @param - argc : argvЪ§зщдЊЫиИіЪ§
* @param - argv : ОпЬхВЮЪ§
* @return : 0 ГЩЙІ;ЦфЫћ ЪЇАм
*/
int main(int argc, char *argv[])
{
int fd, retvalue; //fd: ЮФМўУшЪіЗћ гУвдЖдЮФМўВйзї retvalue:ДцЗХКЏЪ§ВйзїКѓЕФЗЕЛижЕ
char *filename; //filename:ЮФМўУћ,гажїКЏЪ§ВЮЪ§ДЋШыИГжЕ
unsigned char databuf[1]; //ЖЈвхЕФbuf,гУРДЖСаДЪ§ОнгУ
if(argc != 3){ //ХаЖЯжїКЏЪ§ДЋШыЕФКЏЪ§ЕФВЮЪ§ЕФИіЪ§
printf("Error Usage!\r\n");
return -1;
}
filename = argv[1]; //ЛёШЁЕк1ИіВЮЪ§,ДцЗХЕФЪЧЮФМўЕФТЗОЖ(МДвЊВйзїЕФЩшБИЮФМўТЗОЖ)
fd = open(filename,O_RDWR); /*ДђПЊЧ§ЖЏЮФМў*/
if(fd < 0){
printf("Can't open file %s\r\n",filename); /*ДђПЊЪЇАм,ЪфГіЬсЪО*/
return -1;
}
databuf[0] = atoi(argv[2]); /* вЊжДааЕФВйзї:ДђПЊЛђЙиБе */
retvalue = write(fd, databuf, sizeof(databuf)); /*ЯђЩшБИЧ§ЖЏаДШыЪ§Он*/
if(retvalue < 0){
printf("LED Control Failed!\r\n",filename); /*аДШыДэЮѓЪфГіЬсЪО*/
}
retvalue = close(fd); /*ЙиБеЮФМў*/
if(retvalue < 0){
printf("Can't close file %s\r\n",filename); /*ЙиБеДэЮѓЪфГіЬсЪО*/
return -1;
}
return 0;
}
//БрвыжИСю: arm-linux-gnueabihf-gcc gpioledApp.c -o gpioledApp
Ш§ЁЂБрвы
1ЁЂЧ§ЖЏБрвы
дкgpioled.cЮФМўЕФЭЌМЖФПТМЯТДДНЈвЛИіMakefileЮФМў,ЪфШывдЯТФкШн:
KERNELDIR := /home/water/water/kernel/linux-imx-onefu-20211111
CURRENT_PATH := $(shell pwd)
obj-m := gpioled.o
build: kernel_modules
kernel_modules:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) modules
clean:
$(MAKE) -C $(KERNELDIR) M=$(CURRENT_PATH) clean
# KERNELDIRБэЪОПЊЗЂАхЫљЪЙгУЕФLinuxФкКЫдДТыФПТМ,ЪЙгУОјЖдТЗОЖ
# CURRENT_PATHБэЪОЕБЧАТЗОЖ,жБНгЭЈЙ§дЫааЁАpwdЁБУќСюРДЛёШЁЕБЧАЫљДІТЗОЖЁЃ
# obj-mБэЪОНЋ gpioled.cетИіЮФМўБрвыЮЊ gpioled.koФЃПщ
# ОпЬхЕФБрвыУќСю,КѓУцЕФmodulesБэЪОБрвыФЃПщ,
#-CБэЪОНЋЕБЧАЕФЙЄзїФПТМЧаЛЛЕНжИЖЈФПТМжа,
#вВОЭЪЧKERNERLDIRФПТМЁЃMБэЪОФЃПщдДТыФПТМ,
#ЁАmake modulesЁБУќСюжаМгШыM=dirвдКѓГЬађЛсздЖЏЕНжИЖЈЕФdirФПТМжаЖСШЁФЃПщЕФдДТыВЂНЋЦфБрвыЮЊ.koЮФМў
#
#
ЕквЛааЪЧФкКЫдДТыЕФОјЖдТЗОЖ,ЖСепИљОнздМКЕФЪЕМЪТЗОЖаоИФМДПЩ,ЕкШ§ааЕФobj-mБэЪОНЋgpioled.cетИіЮФМўБрвыЮЊgpioled.koФЃПщ,ОЭЪЧЖдгІЕФЦфгрЛљБОКЭЩЯЪівЛжТМДПЩЁЃ
БраДЭъ,БЃДц,ШЛКѓдкжеЖЫЪфШы:make ,НјааБрвыЧ§ЖЏМДПЩ,БрвыНсЙћШчЯТЭМ:
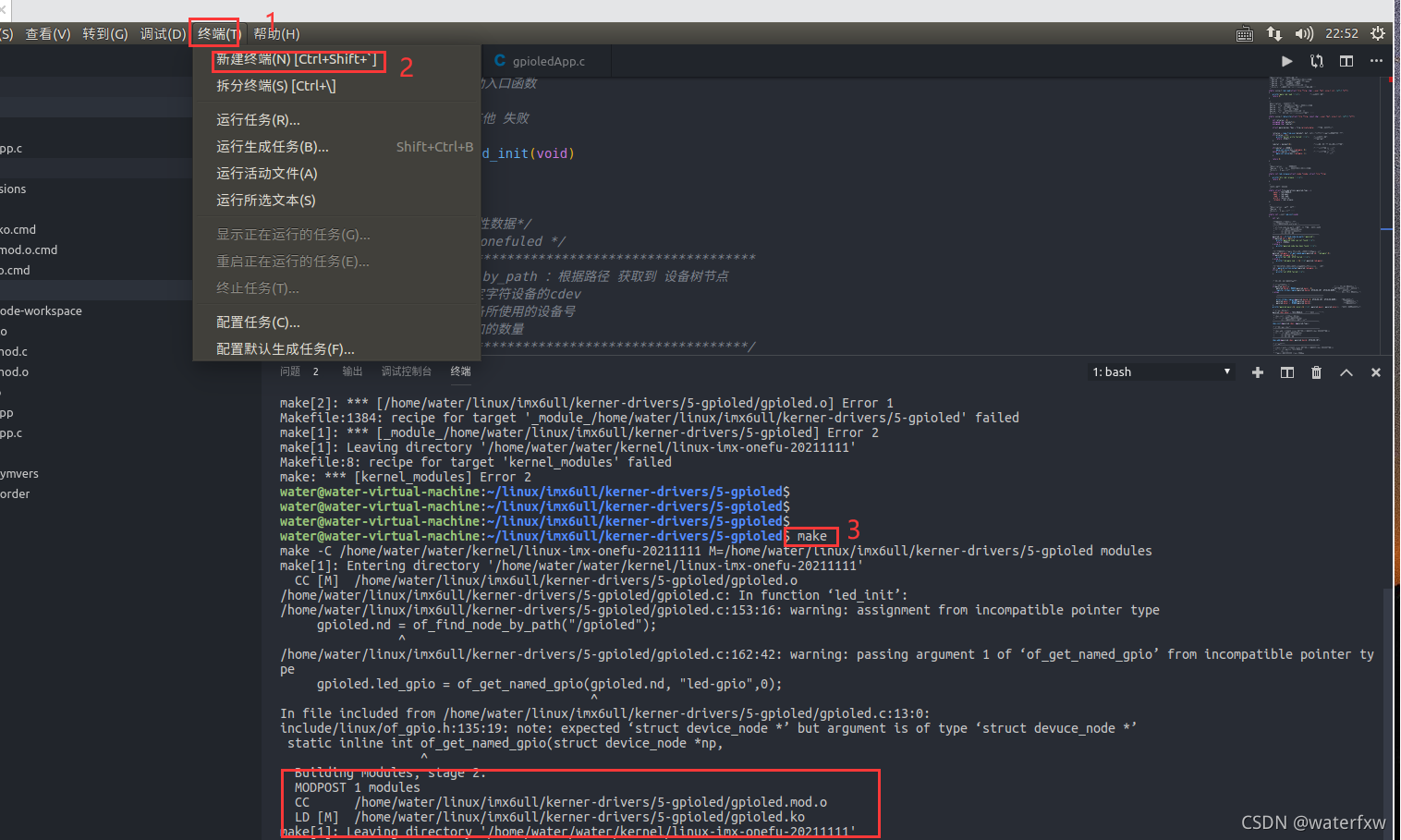
ЩЯЭМгУЕФЪЧvscodeздДјЕФжеЖЫБрвы,вВПЩЭЈЙ§ubuntuЕФжеЖЫНјШыЕНЖдгІЕФФПТМЯТЪфШыmakeУќСюНјааБрвы,БрвыГЩЙІКѓ,ЕБЧАФПТМЯТЩњГЩЁАgpioled.koЁБКЭЦфЫќвЛаЉЮФМў,гУЕФЧ§ЖЏЮФМўОЭЪЧетИіЁА.koЁБЮФМў,ЦфгрВЛЙмЁЃ
2ЁЂВтЪдAPPБрвы
ЭЌбљдкvscodeДђПЊЕФжеЖЫЪфШы:arm-linux-gnueabihf-gcc gpioled.c -o gpioled ,ЖдВтЪдAPPНјааБрвыЁЃШЛКѓЛсЩњГЩgpioledетИіПЩжДааЮФМў,ПЩЭЈЙ§ЁАfile gpioledЁБ,етИіУќСюВщПДЮФМўаХЯЂ,ШчЯТЭМ:

ЫФЁЂдЫааВтЪд
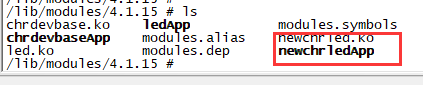
1ЁЂНЋЧ§ЖЏЮФМўЁАgpioled.koЁБ КЭВтЪдГЬађЁАgpioledЁБ,ПНБДЕНИљЮФМўЯЕЭГ(зїепЪЙгУЕФЪЧnfsЙвдиИљЮФМўЯЕЭГЕФаЮЪН,ЯъЯИПЩВЮПМЯЕЭГвЦжВВПЗж)ЕФЁАlib/modules/4.1.15ЁБФПТМЯТ,ШчЙћВЛДцдкдђДДНЈФПТМ,ФПТМЁА4.1.15ЁАжївЊЪЧгУРДЧјБ№ВЛЭЌФкКЫАцБОЁЃПНБДКѓЕФФПТМЯТгаЯТЭМКьЩЋПђЕФетСНИіЮФМўЁЃ
cp gpioled.ko /home/water/linux/nfs/onefu-rootfs-20211024/lib/modules/4.1.15/
cp gpioledApp /home/water/linux/nfs/onefu-rootfs-20211024/lib/modules/4.1.15/

2ЁЂНЋПЊЗЂАхДЎПкСДНгЕчФд,ДђПЊCRT,ШЛКѓДђПЊЕчдД,ЕБНјШыЕЙМЦЪБЪБАДЯТЛиГЕ,ШУПЊЗЂАхдЫаадкubootзДЬЌЯТ,дкетИізДЬЌЯТжївЊЪБХфжУвдЯТЛЗОГБфСП,ОпЬхШчЯТ:
//ЩшжУbootcmd
setenv bootcmd 'tftp 80800000 zImage; tftp 83000000 imx6ull-alientek-emmc.dtb; bootz 80800000 - 83000000'
//ЩшжУbootargs
setenv bootargs 'console=ttymxc0,115200 root=/dev/nfs nfsroot=192.168.1.144:/home/water/linux/nfs/onefu-rootfs,proto=tcp rw ip=192.168.1.145:192.168.1.144:192.168.1.1:255.255.255.0::eth0:off'
saveenv //БЃДцЛЗОГБфСП
boot //ЦєЖЏ
Ек2аа:setenv bootcmd: БэЪОЩшжУ ЛЗОГБфСПжаЕФ bootcmd ЕФжЕ;
tftp 80800000 zImage:БъжОЭЈЙ§ftfpЕФаЮЪНДгЗўЮёЦїЯТдиzImageЮФМўЕН ЕижЗ80800000;
tftp 83000000 imx6ull-alientek-emmc.dtb:ЭЌЩЯвЛбљ;
bootz 80800000 - 83000000:ЩшжУbootЦєЖЏЕФФкКЫЕижЗКЭЩшБИЕижЗЁЃ
Ек4аа:setenv bootargs : БэЪОЩшжУ ЛЗОГБфСПжаЕФ bootargs ЕФжЕ;
console=ttymxc0,115200 :ЩшжУжеЖЫ КЭВЈЬиТЪ;
root=/dev/nfs:ЩшжУrootЕФЦєЖЏФПТМЪЧ/dev/nfs;
nfsroot=192.168.1.144:/home/water/linux/nfs/onefu-rootfs:ДгЗўЮёЦїIPЮЊ192.168.1.144ЕФЖдгІФПТМ;
proto=tcp :ЩшжУЭЈаХЕФЗНЪН TCP;
rw :БъЪЖЖСаДЙІФм
ip=192.168.1.145:192.168.1.144:192.168.1.1:255.255.255.0:ЗжБ№ЪЧ,ЕмЕмПЊЗЂАхIPЁЃЗўЮёЦїIP,ЭјЙи,бкТы;
Ек5аа: saveenv :БЃДцЩшжУЕФЛЈФёОэБфСП
Ек6аа:boot:дЫааНјШыLinuxЁЃ
3ЁЂНјШыLinuxКѓ,НјШыФПТМЁБ/lib/modules/4.1.15ЁА,ШЛКѓгУУќСюЁБlsЁА ВщПДЮФМў;
4ЁЂЙвдиЧ§ЖЏ
ЪфШыШчЯТУќСюМгдиgpioled.koЧ§ЖЏЮФМў:
//ЯШжДааУќСю
depmod
//дкжДаа
modprobe gpioled.ko
ЙвдиГЩЙІЛсЪфГіЁБ gpioledmajor=249. minor=0 ЁА,GPIOЕФБрКХЮЊ3,ШчЯТЭМ:
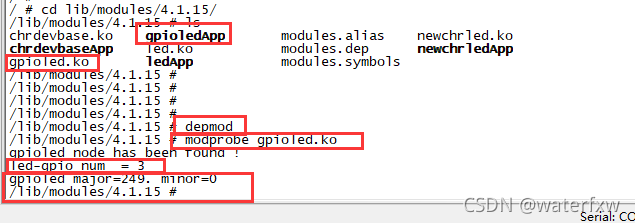
ВЩгУаТзжЗћЩшБИЗНЪН,ЙвдиКѓЛсздЖЏДДНЈЩшБИНкЕу,ЮоашЪжЖЏДДНЈ,ЙвдкКѓжБНгВщПДЩшБИНкЕуаХЯЂМДПЩЁЃ
5ЁЂВщПДЩшБИНкЕу
ПЩвдЪЙгУЁАls /dev/gpioled -lЁБУќСюВщПД,НсЙћШчЯТЭМЫљЪО:

6ЁЂдЫаабщжЄ
ЪзЯШНјааДђПЊLED,ЪфШыШчЯТУќСю:
./gpioledApp /dev/gpioled 1
НсЙћШчЯТЭМ:

НгЯТРДВтЪдЖдledЩшБИНјааЙиБеВйзї,ЪфШыШчЯТУќСю:
./gpioledApp /dev/gpioled 0
НсЙћШчЯТЭМ:

ЭЈЙ§ЩЯУцСНИіУќСюПЩЖдLEDЕЦНјааПЊЙиПижЦ,ЖСепздааВтЪдбщжЄ,БЪепЕФВйзїГЩЙІдЫааЁЃ
7ЁЂаЖдиЧ§ЖЏФЃПщ
ЪфШыШчЯТУќСюаЖдиЧ§ЖЏФЃПщ:
rmmod gpioled.ko

ЭЈЙ§ЁБlsmodЁАУќСюВщПДФЃПщЪЧЗёЛЙдк,ШчЯТЭМ:

гаЩЯЭМПЩПДГі,ФЃПщвбОаЖдиЭъГЩЁЃ
жСДЫ,аТзжЗћЩшБИЧ§ЖЏЯТЪЙгУpinctrlзгЯЕЭГКЭgpioзгЯЕЭГЕФЧ§ЖЏПЊЗЂЕФLEDЧ§ЖЏПЊЗЂЙ§ГЬ,ШчЩЯЫљМЧТМЁЃ
ШчгаВЛзужЎДІЛЙЭћжИЕу,ЛЖгНЛСї,ЙВЭЌбЇЯАЁЃ
СЊЯЕЗНЪНQQ:759521350