1.CFS
���ں� V2.6.23 �ķ�����,��ȫ��ƽ���ȳ���(CFS)��ΪĬ�ϵ� Linux �����㷨��
- Linux ϵͳ�ĵ��Ȼ�����������
- ÿ�����һ���ض����ȼ���
- �ں���Բ�ͬ�ĵ�����,���ò�ͬ�ĵ����㷨,�Ա�����ϵͳ����̵���Ҫ��
- ����,���� Linux �������ĵ�����,Ҳ����ͬ���ƶ��豸�ġ�Ϊ��ȷ��Ӧ�����ĸ�����,���ȳ����������ȼ���������ѡ�����������ȼ�������
Linux ���ں�ʵ������������:���� CFS �����㷨��Ĭ�ϵ������ʵʱ�����ࡣ����ֱ�������Щ����Ȼ,�µ�����Ҳ�����ӡ�
- CFS ���ȳ��������ϸ������Ϊһ�����ȼ�����ij�����ȵ�ʱ��Ƭ,����Ϊÿ���������һ�������� CPU ����ʱ�䡣
- ÿ���������ľ�������Ǹ����Ѻ�ֵ(�Ѻ�һ��Դ�������뷨:��һ�����������������Ѻ�ֵ,��� 0 �� +10,������ͨ���������ȼ�,������������������Ѻá�)������ġ�
- �Ѻ�ֵ�ķ�Χ�� -20 �� +19,��ֵ�ϵ͵��Ѻ�ֵ��ʾ�ϸߵ�������ȼ������нϵ��Ѻ�ֵ������,����нϸ��Ѻ�ֵ���������,��õ����߱����Ĵ���������ʱ�䡣
- Ĭ���Ѻ�ֵΪ 0��
CFS û��ʹ����ɢ��ʱ��Ƭ,���Dz���Ŀ���ӳ�,����ÿ������������Ӧ������һ�ε�ʱ������
- ����Ŀ���ӳ�,���������� CPU ʱ�䡣����Ĭ��ֵ����Сֵ��,����ϵͳ�ڵĻ��������������һ����ֵ,Ŀ���ӳٿ������ӡ�
CFS ���ȳ���û��ֱ�ӷ������ȼ����෴,��ͨ��ÿ������ı��� vruntime �Ա�ά����������ʱ��,������¼ÿ���������ж�á�
-
��������ʱ��������������ȼ���˥�������й�,�������ȼ�������ȸ������ȼ���������и���˥�����ʡ�
-
�����������ȼ�������(�Ѻ�ֵΪ 0),��������ʱ����ʵ����������ʱ������ͬ�ġ�
-
���,���һ��Ĭ�����ȼ����������� 200ms,��������������ʱ��ҲΪ 200ms��Ȼ��,���һ���ϵ����ȼ����������� 200ms,��������������ʱ�佫���� 200ms��ͬ��,���һ���������ȼ����������� 200ms,��������������ʱ�佫С�� 200ms���������²������ĸ�����ʱ,���ȳ���ֻ��ѡ�������С��������ʱ���������,һ���������ȼ����������Ϊ������,�ͻ���ռ�����ȼ�����
�������һ�� CFS ���ȳ�������ι����ġ�
- ��������������,���Ǿ�����ͬ���Ѻ�ֵ��һ�������� I/O �ܼ��Ͷ���һ��Ϊ CPU �ܼ��͡�
- ͨ��,I/O �ܼ������������кܶ�ʱ���ͻ������Ա�ȴ������ I/O;
- �� CPU �ܼ�������ֻҪ���ڴ����������еĻ���,�ͻ���������ʱ��Ƭ��
���,I/O �ܼ����������������ʱ�����ս���С�� CPU �ܼ��������,�Ӷ�ʹ�� I/O �ܼ���������и��ߵ����ȼ���
��ʱ,��� CPU �ܼ�������������,�� I/O �ܼ������������ʸ��������(����������ȴ��� I/O �ѳ�Ϊ����),��ô I/O �ܼ�������ͻ���ռ CPU �ܼ�������
2.ʵʱ����
Linux Ҳʵ����ʵʱ���ȡ����� SCHED_FIFO �� SCHED_RR ʵʱ���������ȵ��κ�����,����ͨ(��ʵʱ��)�������,���и��ߵ����ȼ���
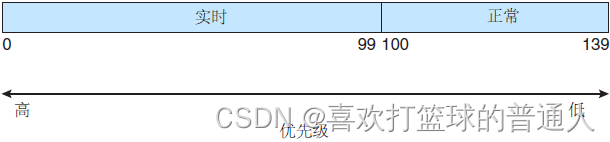
Linux �����������������ȼ���Χ,һ������ʵʱ����,��һ��������������
-
ʵʱ�������ľ�̬���ȼ�Ϊ 0?99,�����������������ȼ�Ϊ 100?139��
-
Linuxϵͳ�ĵ������ȼ�
-
������ֵ��ϲ���Ϊһ��ȫ�ֵ����ȼ�����,���нϵ���ֵ�����ϸߵ����ȼ���
-
��������,�������ǵ��Ѻ�ֵ,����һ�����ȼ�;���� -20 ���Ѻ�ֵӳ�䵽���ȼ� 100,�� +19 ���Ѻ�ֵӳ�䵽 139��
3.CFS����
Linux CFS ���ȳ�����ø�Ч�㷨,�Ա�ѡ�������¸�����
-
ÿ�������е���������ں������(����һ��ƽ��ġ�����������,���ļ��ǻ�����������ʱ���)��
-
����������ͼ��ʾ:

-
��һ�������ɿ�����ʱ,�������ӵ����ϡ���һ�������ɲ�������ʱ(����,�������ȴ� I/O ʱ),�������ϱ�ɾ����
-
һ����˵,�õ����ٴ���ʱ�������(��������ʱ���С)��ƫ���������;�õ��϶ദ��ʱ��������ƫ�������Ҳࡣ
-
���ݶ���������������,�����Ľ������С�ļ�ֵ;�� CFS ���ȳ���Ƕȶ���,��Ҳ�Ǿ���������ȼ�������
-
���ں������ƽ���,�ҵ�����������Ҫ O(lgN) ����(���� N Ϊ���ڽ������)������,Ϊ��Ч���,Linux ���ȳ������ֵ�����ڱ��� rb_leftmost ��,�Ӷ�ȷ���ĸ���������ֻ����������ֵ��
4.CFS������
CFS������ʵӲ����ģ���һ�֡���ƽ�ġ���ȷ������ദ��CPU����
- ��ƽ,������n���������е�����,����Щ����ͬʱ���ϵ�����ʱ,CPU�ᾡ���ܷ��������1/n�Ĵ���ʱ�䡣CFS��һ�ֻ��ڼ�Ȩ��ƽ�Ŷ�˼��ĵ����㷨��
- ��ȷ,ָ���������ú������Ϊ���ȵ�������е����ݽṹ��
������ص�
- �������һ������Ķ���������,Ҳ������߽ڵ㶼С�ڸ��ڵ㶼С���ұ߽ڵ�,�ݹ���������������һ�㡣
- Ҳ����˵����ߵ�Ҷ�ӽڵ�����С��,���ұߵ�Ҷ�ӽڵ������ġ�
- �������ȶ������������˺�ɫ��ɫ������ɫ�ĺ궨��,�����������5������:
(1)ÿ�����Ҫô�Ǻ��Ҫô�Ǻڵġ�
(2)������Ǻڵġ�
(3)ÿ��Ҷ��㶼�Ǻڵġ�
(4)���һ������Ǻ��,��ô�����������Ӷ��Ǻڵġ�
(5)�������������,�䵽Ҷ����ÿ��·����������ͬ��Ŀ�ĺڽ�㡣 - �����ͨ����ÿ���ڵ�������ɫ����,ʹ�ú�����IJ��ҡ����롢ɾ��������ʱ�临�Ӷȶ���O(log n)
CFS�ص�
- CFSʹ�ú�����ṹ,���洢Ҫ���ȵ�������С�
- ÿ���ڵ������һ��Ҫ���ȵ�����,�ڵ��key��Ϊ����ʱ��(vruntime),����ʱ����������������ʱ����������
- keyԽС,Ҳ����vruntimeԽС�Ļ�,�������Ӧ�Ľڵ��Խ����
- CFS schedulerÿ�ζ���ѡ����ߵĽڵ���Ϊ��һ��Ҫ���е�����,����ڵ��ǡ�����ġ�������һ�������ָ��ָ��;����Ҫ����O(logn)���������ҡ�Ҳ���,CFS������ʱ����O(1)��
CFS�ܺܿ�Խ���ʽ����������Ӧ��ԭ������
- ������������˵,vruntime = 0
- vruntime����������С��,��һ����Сֵ������
�����½��̵�vruntime��ֵΪ0�Ļ�,���Ͻ��̵�ֵС�ܶ�,��ô�����൱����ʱ���ڶ��ᱣ����ռCPU������,�Ͻ��̾�Ҫ������,����Ȼ�Dz���ƽ�ġ� - CFS����������:ÿ��CPU�����ж��� cfs_rq��ά��һ��min_vruntime�ֶ�,��¼�����ж��������н��̵�vruntime��Сֵ,�½��̵ij�ʼvruntimeֵ�������������ж��е�min_vruntimeΪ����������,���Ͻ��̱����ں����IJ�Χ�ڡ�
- CFS�Ļ�����ռ����:
(1)���߽����ڻ���ʱ����vruntime�IJ���,����������ʱ����������ռCPU�Ǵ�����¼�,��Ҳ��CFS�����㷨�ı���,����֤����ʽ���̵���Ӧ�ٶ�,��Ϊ����ʽ���̵ȴ��û������Ƶ�����ߡ�
(2)����һ�µ���ִ��ÿһ���û����̡��ƶ����Ƚ���������ʱ��,����ϵͳ��˵,��������˸�������->����ʱ��Ϊ0->vruntimeΪ0->���ŵ�����������к����������ڵ�->����ڵ�ͨ��һ�������ָ��ָ��,�Ҹ�ָ���ѱ�����
CFSԭ��:
- ���������ִ��,��������ʱ������,���vruntimeҲ����,�����ں�����������ƶ�(����һ���������);
- �����ܼ�����ҵ�����кܳ�ʱ��,��������Ƶ����Ҳ�;
- /O�ܼ�����ҵ�����к̵ܶ�ʱ��,�����ֻ���������ƶ�;
- ���ڸ���Ҫ������,Ҳ����niceֵ��С��(һ����С��0),���ǵ��ƶ��ٶ�������ܶࡣ(�����nice = 0������,niceÿСһ��,CPU usage�ͻ��10%,��10% effect��)����ʱ�ӵĵδ���������
CFS��ȱ��:
-
Ҳ�ͻ�����ռ�����йء�
-
CFS�������ֽ���ʽ���̺��������ߵĽ���,�������ߵĽ��̲���Ҫ�������Ӧ,��Ҳ���ڻ���ʱ��ò���,����ͨ������sleep()��nanosleep()�ķ�ʽ,��ʱ��������ض�����,���п��ܻᵼ����������Ҫ��Ӧ�ý��̱���ռ,�����������ܡ�
-
�ο�:����ϵͳ�����㷨3����CFS,��ȫ��ƽ������,Linux���̵��Ȳ���(CFS����)���

