linuxФкКЫБрГЬ-qemuЛЗОГДюНЈ
1.БГОА
зюНќЯыбЇЯАlinuxФкКЫКЭЧ§ЖЏПЊЗЂ,ЕЋЪЧВЛЯыТђПЊЗЂАх,ЦфЪЕЮвОѕЕУТђСЫвВТђЪБМфЭцЫЃЁЃвдЧАЖСЪщЕФЪБКђТђЙ§2440,КѓУцЕНКМжнТђСЫ6410КЭ4412,ТђЕФЪБКђаЫжТВЊВЊ,ТђСЫжЎКѓаТЯЪСЫСНЬь,гЩгкИїжждвђЛЙЪЧЗХЦњСЫ,ЯждкПДЕНгаащФтЛЗОГ,ЙЄзїжЎгрЯЃЭћПЩвдбЇЯАвЛЯТЁЃ
2.ФПЕФ
ЩюШыбЇЯАlinuxФкКЫКЭЧ§ЖЏЁЃ
3.ащФтЛњ+Ubuntu
ащФтЛњПЩвдзА15/6;
ubuntuПЩвдзА16/18/20ЕФ,ашвЊАВзАСНПщЭјПЈЖМЪЧNATЧХНгЁЃ
ащФтЛњзАСЫжЎКѓЛсИВИЧдЯШЕФОЩАцБО,ЕЋЪЧдРДЕФЯЕЭГвВПЩвдЪЙгУЁЃ
4.Git
жївЊЪЧЮЊСЫДњТыЙмРэ,вЕНчЙЋШЯЕФЁЃ
5.qemu
5.1ЗНЪН1:
ЯЕЭГОЕЯёдДздДј,АцБОНЯЕЭ,ЕЋЪЧШыУХЙЛгУЁЃ
5.1.1АВзА
sudo apt-get install qemu
5.1.2МьВт
qemu-system-arm -M help
5.2 ЗНЪН2:
здМКБрвыАВзАЁЃ
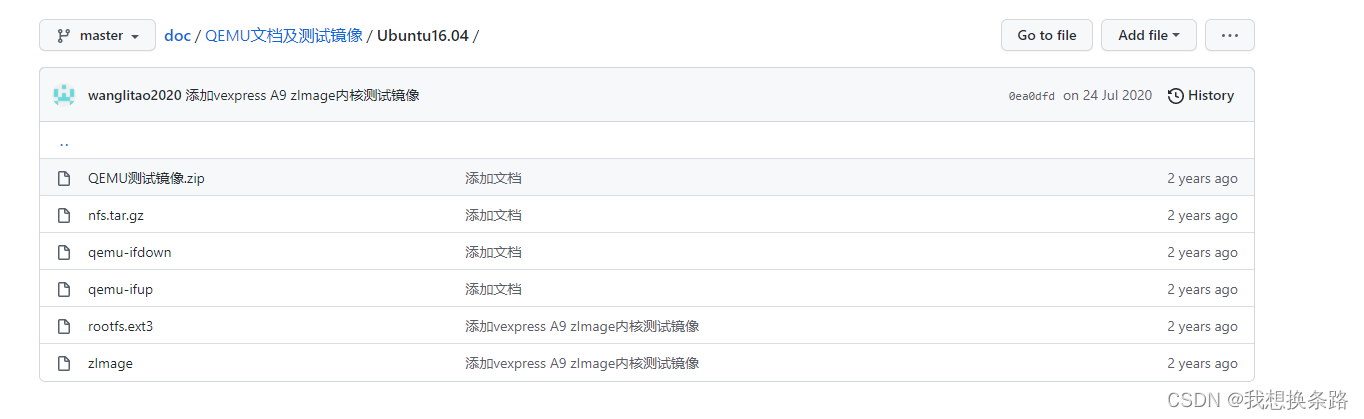
6. ВтЪдОЕЯёЯТди
https://github.com/wanglitao2020/doc
https://gitee.com/wang_litao/doc
7.qemuЦєЖЏВтЪд
7.1 zImageЦєЖЏ
touch boot.sh
gedit boot.sh
qemu-system-arm \
-M vexpress-a9 \
-m 512M \
-dtb ./vexpress-v2p-ca9.dtb \
-kernel ./zImage \
-append "root=/dev/mmcblk0 rw console=tty0" \
-sd rootfs.ext3
chmod +x boot.sh
./boot.sh
7.2 zImage ПижЦЬЈЦєЖЏ
qemu-system-arm \
-M vexpress-a9 \
-m 512M \
-nographic \
-dtb ./vexpress-v2p-ca9.dtb \
-kernel ./zImage \
-append "root=/dev/mmcblk0 rw console=ttyAMA0" \
-sd rootfs.ext3
7.3 ubootв§ЕМЦєЖЏ
АВзАвРРЕАќ
sudo apt install net-tools
sudo apt install net-tools uml-utilities bridge-utils
ifconfig ВщПДЭјТч
ens33:192.168.230.135
ens34:192.168.230.136
аоИФ/etc/network/interfacesЮФМў
auto lo
iface lo inet loopback
auto ens33
?auto br0
iface br0 inet dhcp
bridge_ports ens33
жиЦєЭјТчЗўЮёКѓifconfig
br0: flags=4163<UP,BROADCAST,RUNNING,MULTICAST> mtu 1500
inet 192.168.230.135 netmask 255.255.255.0 broadcast 192.168.230.255
inet6 fe80::20c:29ff:fed7:c2d9 prefixlen 64 scopeid 0x20<link>
ether 00:0c:29:d7:c2:d9 txqueuelen 1000 (Ethernet)
RX packets 7614 bytes 925743 (925.7 KB)
RX errors 0 dropped 0 overruns 0 frame 0
TX packets 7461 bytes 10786796 (10.7 MB)
TX errors 0 dropped 0 overruns 0 carrier 0 collisions 0
ЦєЖЏU-bootЕФНХБОШчЯТ:
qemu-system-arm \
-M vexpress-a9 \
-m 512M \
-nographic \
-kernel ./u-boot \
-net nic,vlan=0 -net tap,vlan=0,ifname=tap0 \
-sd rootfs.ext3
ubootЛЗОГЩшжУЕижЗ
=> setenv ipaddr 192.168.230.130
=> setenv serverip 192.168.230.135
=> ping 192.168.230.135
жїЛњАВзАTFTPЗўЮё
$ sudo apt-get install tftp-hpa tftpd-hpa xinetd
дкUbuntuЯТаоИФХфжУЮФМў:/etc/default/tftpd-hpa
TFTP_USERNAME="tftp"
TFTP_DIRECTORY="/home/wit/tftpboot"
TFTP_ADDRESS="0.0.0.0:69"
TFTP_OPTIONS="-l -c -s"
sudo mkdir /home/wit/tftpboot
sudo chmod 777 /home/wit/tftpboot
sudo /etc/init.d/tftpd-hpa restart
ЦєЖЏМгди
=> setenv ipaddr 192.168.230.130
=> setenv serverip 192.168.230.135
=> tftp 0x60003000 uImage
=> tftp 0x60500000 vexpress-v2p-ca9.dtb
=> bootm 0x60003000 - 0x60500000
7.4здЖЏЛЏв§ЕМ
ЯТдиubootдДТы
аоИФ:include/configs/vexpress_common.h:
/*Netmask*/
196 #define CONFIG_IPADDR 192.168.230.130
197 #define CONFIG_NETMASK 255.255.255.0
198 #define CONFIG_SERVERIP 192.168.230.135
АВзАARMНЛВцБрвыЦї,ВЂБрвыu-boot:
АВзАБрвыЦї:
$ sudo apt install gcc-arm-linux-gnueabi gcc make libncurses-dev bison flex
ХфжУ
CROSS_COMPILE=arm-linux-gnueabi-
export CROSS_COMPILE
make vexpress_ca9x4_defconfig
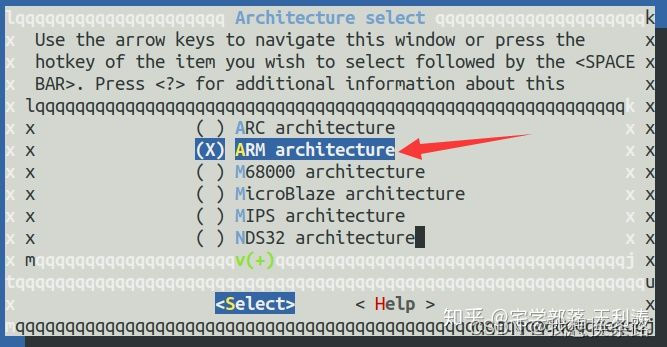
make menuconfig ВЫЕЅбЁЯюХфжУ
дкArchitecture selectбЁЯюжабЁдё:ARM architecture
ЩшжУbootcmdУќСю:
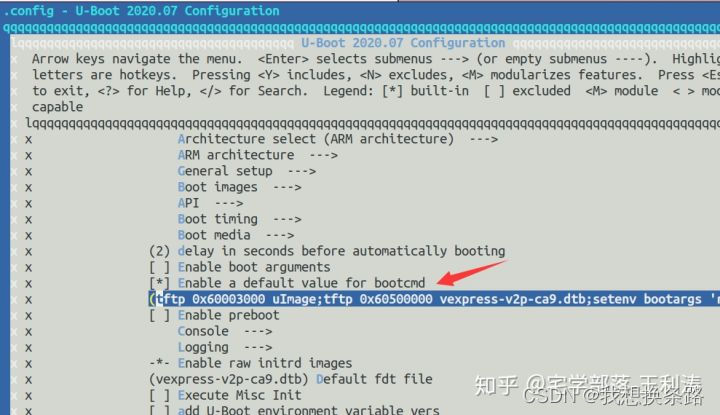
tftp 0x60003000 uImage;tftp 0x60500000 vexpress-v2p-ca9.dtb;setenv bootargs 'root=/dev/mmcblk0 console=ttyAMA0';bootm 0x60003000 - 0x60500000;
Брвы
make
дЫаа
u-bootПНБДЕН/home/wit/tftpbootФПТМ
дЫааНХБОЦєЖЏu-bootПДЪЧЗёФмздЖЏв§ЕМuImageЦєЖЏЁЃ
7.5 NFSЮФМўЯЕЭГ
жїЛњХфжУNFSЗўЮё:
sudo apt install nfs-kernel-server
дк/etc/exportsЮФМўжаЬэМг:
/home/rootfs *(rw,sync,no_root_squash,no_subtree_check)
ПЊЦєNFSЗўЮё:
sudo /etc/init.d/rpcbind restart
sudo /etc/init.d/nfs-kernel-server restart
жїЛњжЦзїЮФМўЯЕЭГ
ЗНЪН1
НтбЙnfs.tar.gz
ЗНЪН2
жиаТжЦзї,ВЮПМИНТМ
аоИФbootargsЦєЖЏВЮЪ§:
ЗНЪН1
tftp 0x60003000 uImage;tftp 0x60500000 vexpress-v2p-ca9.dtb;setenv bootargs 'root=/dev/nfs rw nfsroot=192.168.230.135:/home/wit/rootfs,proto=tcp,nfsvers=4,nolock init=/linuxrc ip=192.168.230.130 console=ttyAMA0';bootm 0x60003000 - 0x60500000;
ЗНЪН2
ХфжУuboot жиаТБрвы
ФкКЫБрвы
аоИФMakefile:ARCH=arm CROSS_COMPILE=arm-linux-gnueabi-
make vexpress_defconfig

make zImage
apt install u-boot-tools
make uImage LOADADDR=0x60003000
make dtbs
ЮФМўПНБД
НЋЩњГЩЕФarch/arm/boot/uImageКЭarch/arm/boot/dts/vexpress-v2p-ca9.dtbПНБДЕН/home/wit/tftpbootФПТМЯТ,ЪЙгУЯТУцЕФУќСюЦєЖЏФкКЫ:
qemu-system-arm \
-M vexpress-a9 \
-m 512M \
-nographic \
-kernel ./u-boot \
-net nic,vlan=0 -net tap,vlan=0,ifname=tap0 \
-sd rootfs.ext3
ИНТМ
жЦзїNFSЮФМўЯЕЭГ
Брвыbusybox
nfs
Linux System Utilities --->
[*] mount (30 kb)
[*] Support mounting NFS file systems on Linux < 2.6.23
ДДНЈrootfsФПТМ
>>mkdir etc
>>cd etc
>>vim inittab
::sysinit:/etc/init.d/rcS // жДааrcSНХБО
#::respawn:-/bin/sh
#tty2::askfirst:-/bin/sh
#::ctrlaltdel:/bin/umount -a -r
console::askfirst:-/bin/sh
::ctrlaltdel:/sbin/reboot
::shutdown:/bin/umount -a -r
>>vim init.d/rcS
#! /bin/sh
PATH=/sbin:/bin:/user/sbin:/usr/bin
LD_LIBRARY_PATH=/lib
export PATH LD_LIBRARY_PATH
mount -a // ЙвдиИљЮФМўЯЕЭГ fstab
mkdir -p /dev/pts
mount -t devpts devpts dev/pts
mdev -s
mkdir -p /var/lock
echo "......"
>>vim fstab
proc /proc proc defaults 0 0
tmpfs /tmp tmpfs default 0 0
sysfs /sys sysfs default 0 0
tmpfs /dev tmpfs default 0 0
var /dev tmpfs default 0 0
ramfs /dev ramfs default 0 0
>>vim profile
PS1='xiami@vexpress:\w #'
export PS1
вВПЩвддк~/.bashrcжааоИФЛђЩшжУPS1
ЦєЖЏСїГЬ:
LinuxФкКЫЦєЖЏжЎКѓ,ЙвдиИљЮФМўЯЕЭГ
ПЊЦєinitНјГЬ,bootargs init=/linuxrc,ЦєЖЏЕквЛИігУЛЇНјГЬ
дкгУЛЇНјГЬжаЖСШЁinittabНХБО,
ЙЙНЈЦфЫћФПТМ
>> cd rootfs
>>mkdir proc mnt tmp sys root\
жЦзїSDЮФМўЯЕЭГ
ЯТдиbusyboxЙЄОп
Дгhttps://busybox.net/downloads/ЯТдизюаТЕФbusyboxЁЃ
ЭЌбљ,НЈвщдкwindowsЯЕЭГЯТЪЙгУбИРзЯТди,ЯШевЕНКЯЪЪЕФbusyboxАцБО,дйгУгвМќ,бЁдёгУбИРзЯТди,етбљЫйЖШЛсКмПь;
НтбЙbusybox
tar -xvf busybox-1.31.1.tar.bz2
ХфжУВЂБрвыbusybox
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- menuconfig
БрвыбЁдёЪЙгУglibcЖЏЬЌПт,вђЮЊОВЬЌПтПЩФмЛсГіЯжвЛаЉЮДжЊЕФЮЪЬт
>> make menuconfig
Settings --->
Build Options --->
[ ] Build static binary (no shared libs)
ФЌШЯЕФАВзАФПТМЪЧ./_install,ШчЙћашвЊжИЖЈАВзАФПТМ,ПЩвддкЯТБпаоИФ:
Settings --->
Installation Options ("make install" behavior)
(./_install) Destination path for 'make install'
>> make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi-
АВзА
make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- install
ЬсЪОЯТБпаХЯЂ,БэЪОАВзАГЩЙІ:
--------------------------------------------------
You will probably need to make your busybox binary
setuid root to ensure all configured applets will
work properly.
ВщПД
>> ls _install/
bin linuxrc sbin usr
ЛђепжБНгЪЙгУCONFIG_PREFIXжИЖЈАВзАФПТМ:
>>make ARCH=arm CROSS_COMPILE=arm-linux-gnueabi- CONFIG_PREFIX=/.../rootfs/ install
Tip ЬсЧАЩшжУКУБрвыФЌШЯжЕ
БрвыАВзАЙ§ГЬжа,вЛжБЪфШыARCH=arm CROSS_COMPILE=arm-linux-gnueabi-БШНЯТщЗГ,ПЩвддкMakefileжаЩшжУКУФЌШЯжЕ;
аоИФMakefile:
>> vim Makefile
ARCH = arm
CROSS_COMPILE = arm-linux-gnueabi-
жЎКѓЕФБрвыЁЂАВзАУќСюОЭМђЕЅСЫ:
>>make
>> make install
ДДНЈИљФПТМ
НЋbusyboxБрвыЩњГЩЕФ_installФПТМЯТЕФЮФМўШЋВППНБДЕНИљЮФМўЯЕЭГФПБъrootfs/ФПТМ:
>> mkdir rootfs
# cp /.../busybox-1.29.3/_install/* rootfs/ -rfd
вВПЩвддкжИЖЈbusyboxЕФАВзАФПТМжБНгАВзА:
# make CONFIG_PREFIX=/.../rootfs/ install
ЬэМгglibcПт
дкИљЮФМўЯЕЭГжаЬэМгМгдиЦїКЭЖЏЬЌПт:
>> mkdir rootfs/lib
#>>cp /usr/arm-linux-gnueabi/lib/* rootfs/lib/ -rfp
ОВЬЌДДНЈЩшБИЮФМў
>> mkdir rootfs/dev
>> cd rootfs/dev
>> mknod -m 666 tty1 c 4 1
>> mknod -m 666 tty2 c 4 2
>> mknod -m 666 tty3 c 4 3
>> mknod -m 666 tty4 c 4 4
>> mknod -m 666 console c 5 1
>> mknod -m 666 null c 1 3
жЦзїSDПЈЮФМўЯЕЭГОЕЯё
ЩњГЩвЛИіПеЕФSDПЈОЕЯё:
>> dd if=/dev/zero of=rootfs.ext3 bs=1M count=32
32+0 records in
32+0 records out
33554432 bytes (34 MB, 32 MiB) copied, 0.0236764 s, 1.4 GB/s
НЋSDПЈИёЪНЛЏЮЊextsЮФМўЯЕЭГ:
mkfs.ext3 rootfs.ext3
mke2fs 1.42.13 (17-May-2015)
Discarding device blocks: done
Creating filesystem with 32768 1k blocks and 8192 inodes
Filesystem UUID: 51ab1063-a137-48e5-a6f4-4552dad3b898
Superblock backups stored on blocks:
8193, 24577
Allocating group tables: done
Writing inode tables: done
Creating journal (4096 blocks): done
Writing superblocks and filesystem accounting information: done
НЋrootfsЩеаДЕНSDПЈ:
>> sudo mount -t ext3 rootfs.ext3 /mnt -o loop
>> sudo cp -rf rootfs/* /mnt/
>> sudo umount /mnt
Tip дкПЊЗЂЙ§ГЬжа,ШчЙћашвЊаоИФSDПЈжаЕФФкШн,ПЩвдНЋSDПЈЕФОЕЯёrootfs.ext3ЙвдиЕН/mntФПТМЯТ,жБНгВйзї/mntРДаоИФ;
>> sudo mount -t ext3 rootfs.ext3 /mnt -o loop
>> cp rootfs.ext3 ~/qemu

