目录
视频讲解
先导课:如何安装Ubuntu系统
-
先 导 课
-
第 1 季 : 快 速 梳 理 知 识 要 点 与 学 习 方 法
-
第 2 季 : 详 细 推 导 数 学 公 式 与 代 码 解 析
-
第 3 季 : 代 码 实 操 以 及 真 实 机 器 人 调 试
-
答 疑 课
------(永 久 免 费 ● 系 列 课 程 ● 长 期 更 新)------
?
本书内容安排

?
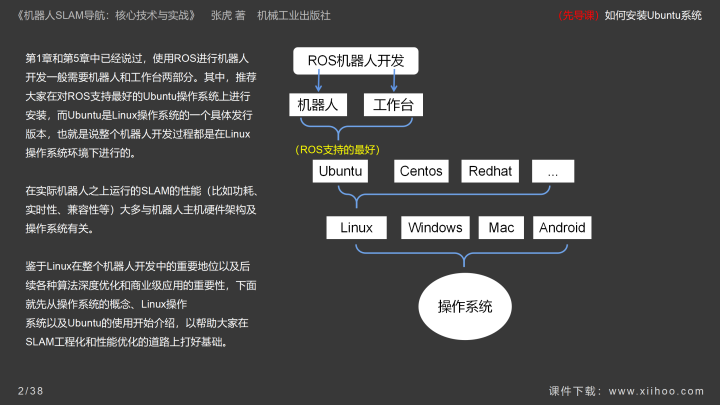
第1章和第5章中已经说过,使用ROS进行机器人开发一般需要机器人和工作台两部分。其中,推荐大家在对ROS支持最好的Ubuntu操作系统上进行安装,而Ubuntu是Linux操作系统的一个具体发行版本,也就是说整个机器人开发过程都是在Linux操作系统环境下进行的。
在实际机器人之上运行的SLAM的性能(比如功耗、实时性、兼容性等)大多与机器人主机硬件架构及操作系统有关。
鉴于Linux在整个机器人开发中的重要地位以及后续各种算法深度优化和商业级应用的重要性,下面就先从操作系统的概念、Linux操作系统以及Ubuntu的使用开始介绍,以帮助大家在SLAM工程化和性能优化的道路上打好基础。
?
内容概要
?
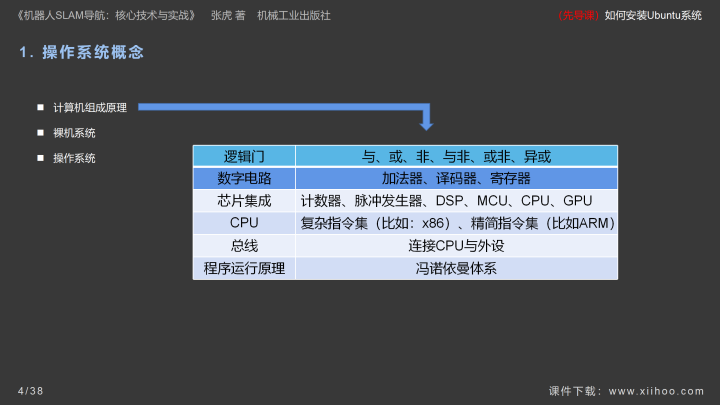
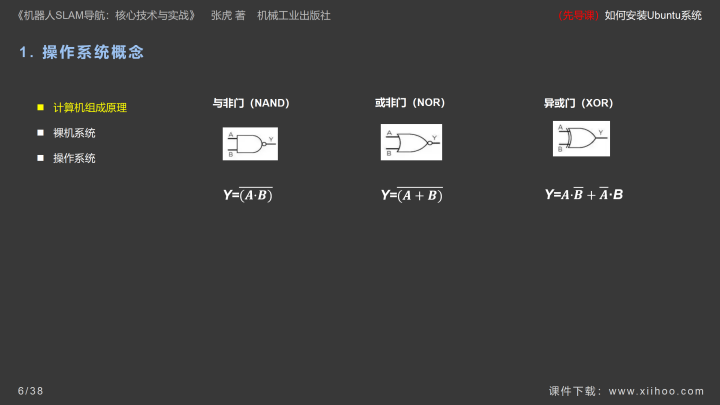
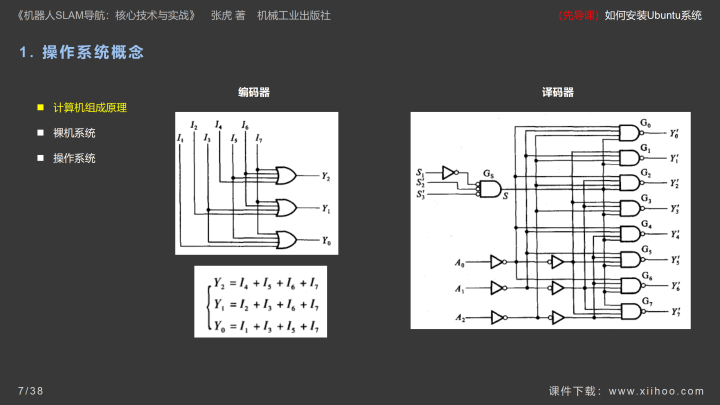
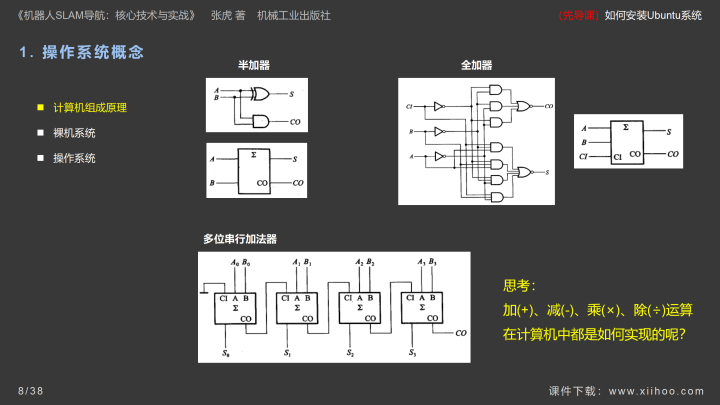
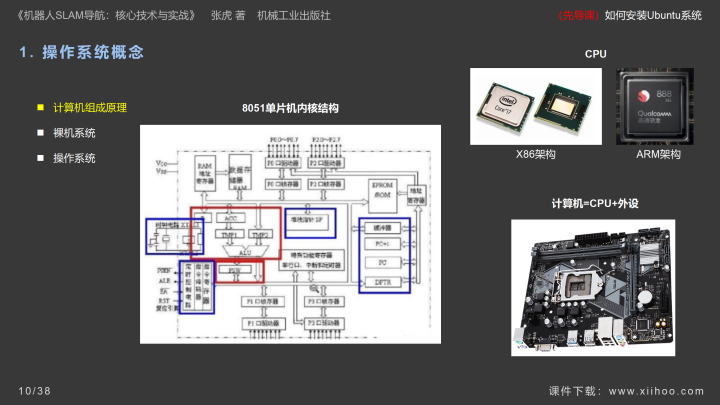
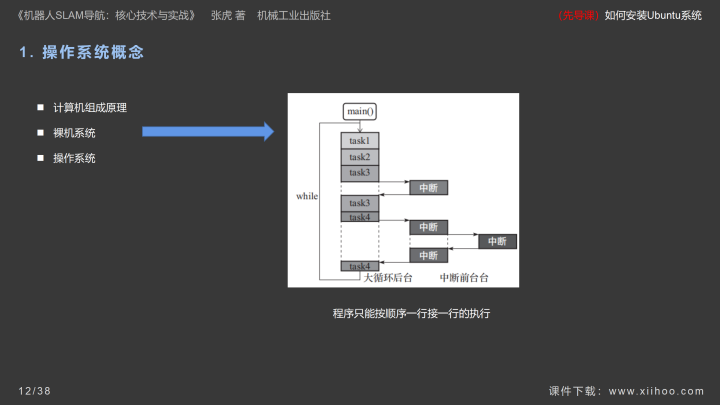
1. 操作系统概念
?

?
?
?
?

?
?

?
?
?
Linux是一个开源、免费的操作系统,以强大的安全、稳定、多并发性能得到业界的广泛认可。目前,Linux被使用在很多中大型甚至巨型项目中。
由于Linux操作系统在服务器、科学计算、嵌入式、机器人等众多领域被广泛使用,本书中用到的ROS也是基于Linux操作系统的发行版Ubuntu运行的,下面具体对Linux操作系统的原理展开讨论。

?
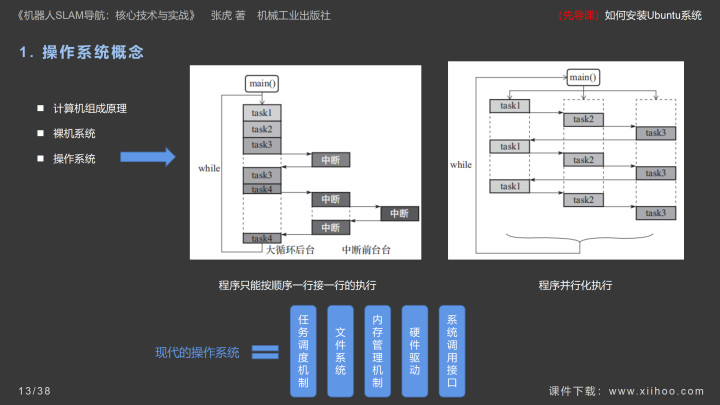
2. Linux操作系统

?
不管是应用层的用户程序还是操作系统内核都是程序,既然是程序就要加载到内存中然后让CPU逐条执行。只不过操作系统先加载到内存中执行以建立起一个友好的环境,这样后续应用层的用户程序就可以在这个友好的环境下运行得更方便。

?

?
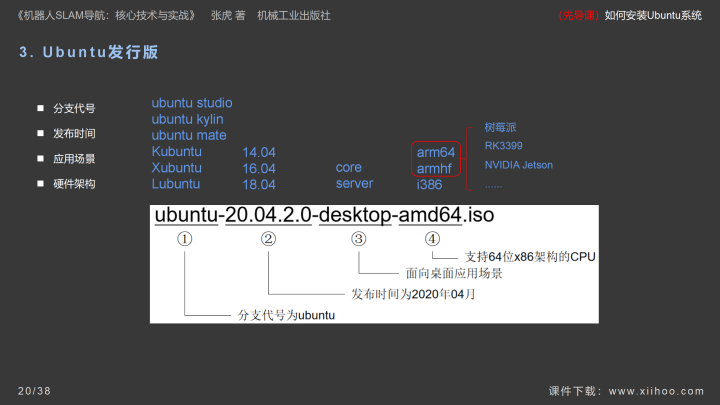
3. Ubuntu发行版
?
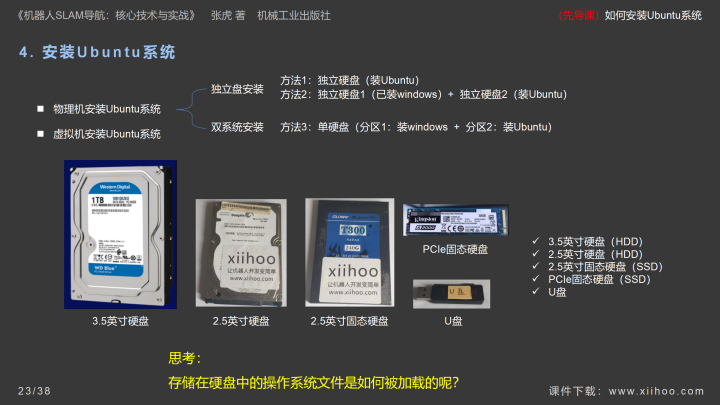
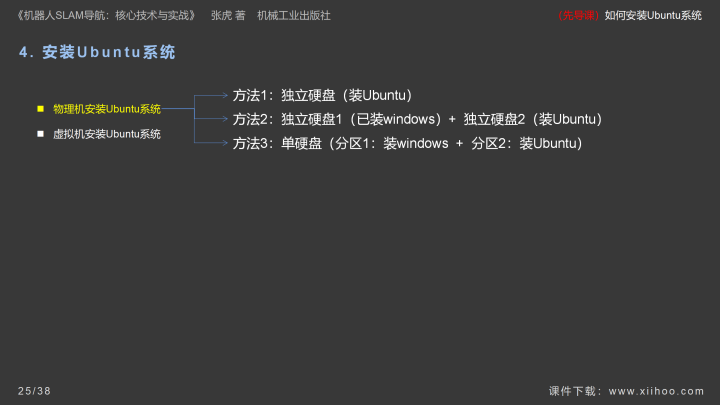
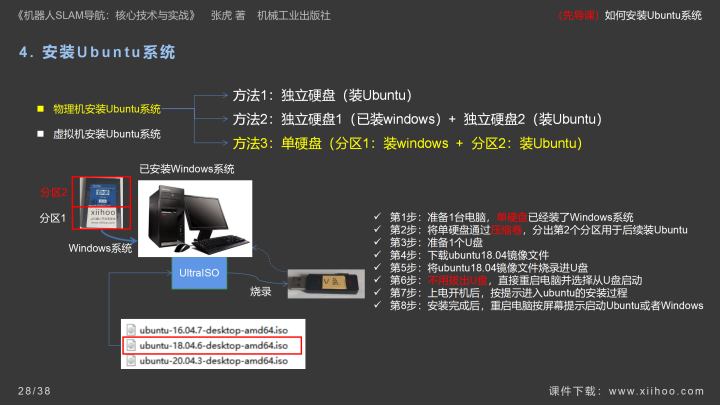
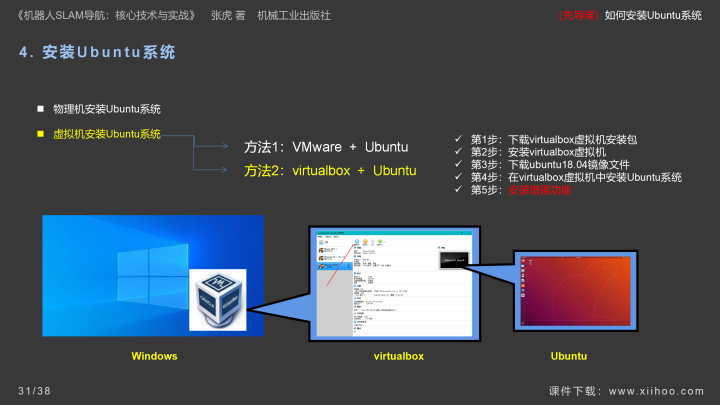
4. 安装Ubuntu系统

?
?

?
?

?

?
?
?

?
?
5. Ubuntu系统基础入门

?
1.存储快照
2.软件源服务器设置
3.虚拟机连网方式设置
4.SSH服务开启
5.文件共享
?
1.菜单
2.常用软件
3.常用设置
?
0.超级用户root初始密码设置
1.打开终端命令行
2.常用快捷键
3.终端命令行中一些常用符号了解
4.关机与重启命令
5.目录与文件相关命令
6.文件权限
7.文件查找
8.网络相关命令
9.系统软件安装与软件运行方法
10.文本编辑器vim使用
11.关于Linux命令行知识的学习方法建议
?
Ubuntu系统镜像
-
ubuntu-18.04.6-desktop-amd64.iso
虚拟机安装包
-
vmware-workstation-full-16.2.3-19376536.exe
-
VirtualBox-6.1.34-150636-Win.exe
工具软件
-
硬盘格式化工具: DiskGenius
-
启动U盘制作工具: UltraISO
-
文件传输工具: FileZilla_3.59.0_win64-setup.exe
例程源码下载
-
Gitee下载(国内访问速度快):gitee.com/xiihoo-robot/Books_Robot_SLAM_Navigation
课件下载
-
PPT课件下载:
-
PDF课件下载:
?

