??����ֻ�Ǹ���ѧϰ������ѧϰ�ʼ�,��Ҫ�ο�ROS�̳�1 2 ��
[ROS](02)����&����ROS������Package
Ŀ¼
1������
??����������(Parameter Server 3):�ǿ���ͨ������ API ���ʵĹ����Ķ�����ֵ䡣������ʱ�ڵ�(Nodes)ʹ�ô˷�����ȥ�洢�ͼ���������(������ȫ�ֱ���,�洢����ڵ㹲�������ݡ�)
Tips:��������������Ϊ������(high-performance)����Ƶ�,���������ھ�̬���Ƕ����Ƶ�����,�����ò�����
2������������ͨ�Ż���
??����������ͨ�� ��ROSͨ����һ�ֱȽ������ֱȽϼ�ͨ�ŷ�ʽ��������������ROS Master�ڲ����С�
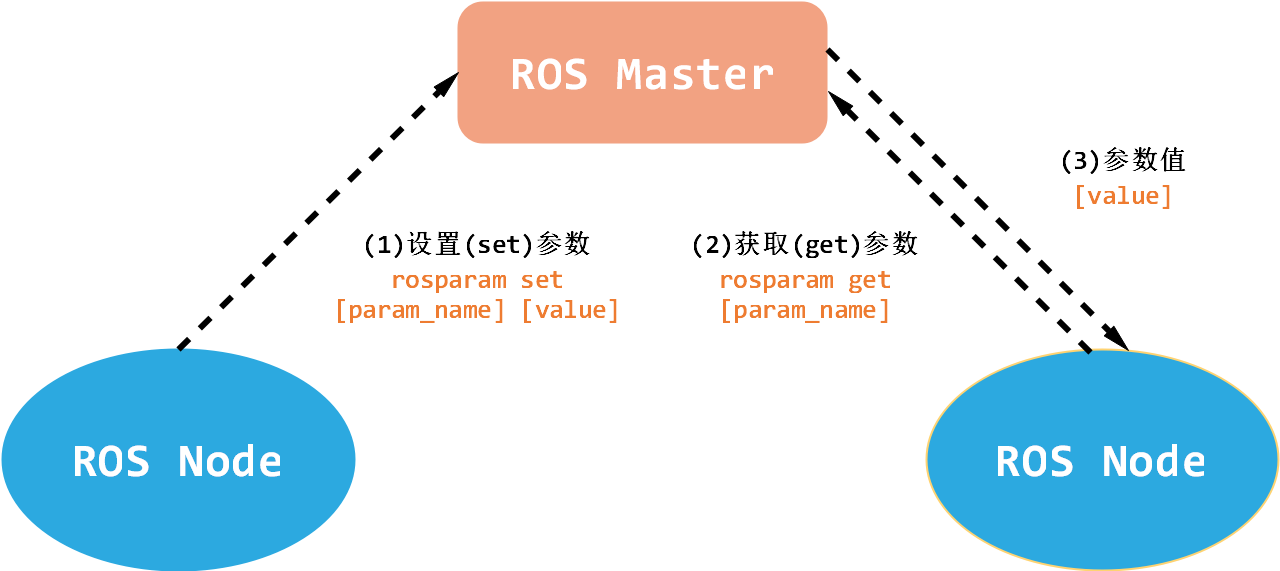
3����������rosparam
?? rosparam 4 ����������ROS����������(Parameter Server)�ϴ洢�Ͳ������ݡ������������ܹ��洢����(integer)������(float)������(boolean)���ֵ�(dictionaries)���б�(list)���������͡�
| ���� | ���� |
|---|---|
rosparam set | ���� |
rosparam get | ��ȡ���� |
rosparam load | ���ļ��м��ز��� |
rosparam dump | ���ļ���ת������ |
rosparam delete | ɾ������ |
rosparam list | ������� |
Tips:
rosparamʹ��YAML������Ե����һ�����,YAML�ı�������Ȼ:1������,1.0�Ǹ�����,one���ַ���,true�Dz�����,[1, 2, 3]��������ɵ��б�,{a: b, c: d}���ֵ䡣
4������������ͨ��ʵ�� �C �ĺ���ģ�����ı�����ɫ
??ͨ��ROS���õ� ����ģ����(turtlesim) �����в���������ͨ�ŵ�ʵ��,�����������ĺ���ģ����������ɫ����:������ɫ��Ϊ��ɫ(RGB: 160 32 240)��
??ʵ�ֵIJ�������:
??����1:�����ն�������roscore
roscore
??����2:�����ն�����������ģ�����Ľڵ�turtlesim_node
rosrun turtlesim turtlesim_node
??����3:�����ն���ʹ��rosparam�����ȡ�����б���
rosparam list

??����4:ͨ�����Թ���rqt������ͱ�̵ķ�ʽ�ĺ���ģ�����ı�����ɫ��
4.1 ���Թ���ʵ��
??�����ն�������rqt�����rqt������,Ȼ���ڲ˵����д����ͷ�����,�ֱ�ΪPlugins/Configuration/Param Edit��Plugins/Services/Service Caller,��ͼ4-3��ʾ��

??��Param Edit�н�����ģ����turtlesim�ı�����ɫbackground_x��ֵ��Ϊ��ɫ,��ͼ4-4��ʾ��;Ȼ����Service Caller��ѡ�����clear����,��ͼ4-4��ʾ��;��������Ͻ�Callʹ�ѱ��ĵIJ�����Ч��

4.2 ���ʵ��(C++)
??��beginner_tutorials��������srcĿ¼�´����ĺ���ģ�����ı�����ɫ��Դ�ļ�:
roscd beginner_tutorials
cd src
touch turtle_set_param.cpp
4.2.1 �������(turtle_set_param.cpp)
#include "ros/ros.h"
#include <std_srvs/Empty.h>
int main(int argc, char **argv)
{
setlocale(LC_ALL,"");
/* ��ʼ��ROS�ڵ� */
ros::init(argc,argv,"turtle_set_param");
/* Ϊ����ڵ㴴����� */
ros::NodeHandle nh("turtlesim");
int red, green, blue;
/* ��ȡ����ģ����������ɫ���� */
ros::param::get("/turtlesim/background_r",red);
ros::param::get("/turtlesim/background_g",green);
ros::param::get("/turtlesim/background_b",blue);
ROS_INFO("Get turtlesim background color[%3d, %3d, %3d]",red ,green,blue);
/* ���ú���ģ����������ɫ����,����Ϊ��ɫ(160,32,240) */
ros::param::set("/turtlesim/background_r",160);
ros::param::set("/turtlesim/background_g",32);
ros::param::set("/turtlesim/background_b",240);
ROS_INFO("Set turtlesim background color[%3d, %3d, %3d]",160 ,32,240);
/* ��ȡ����ģ����������ɫ���� */
ros::param::get("/turtlesim/background_r",red);
ros::param::get("/turtlesim/background_g",green);
ros::param::get("/turtlesim/background_b",blue);
ROS_INFO("Again get turtlesim background color[%3d, %3d, %3d]",red ,green,blue);
/* ���� /clear ����,ʹ�ѱ��ĵIJ�����Ч */
ros::service::waitForService("/clear");
ros::ServiceClient client = nh.serviceClient<std_srvs::Empty>("/clear"); // ����Ϊ�յķ���
std_srvs::Empty srvs;
/* ������� */
if(client.call(srvs))
{
ROS_INFO("����ģ����turtlesim���ĵı�����ɫ����Ч!");
}
else
{
ROS_INFO("���÷���ʧ��!");
}
return 0;
}
4.2.2 ����CMakeLists.txt
??ֻ�轫�⼸�����ӵ�CMakeLists.txt�ļ��ĵײ�:
add_executable(turtle_set_param src/turtle_set_param.cpp)
target_link_libraries(turtle_set_param ${catkin_LIBRARIES})
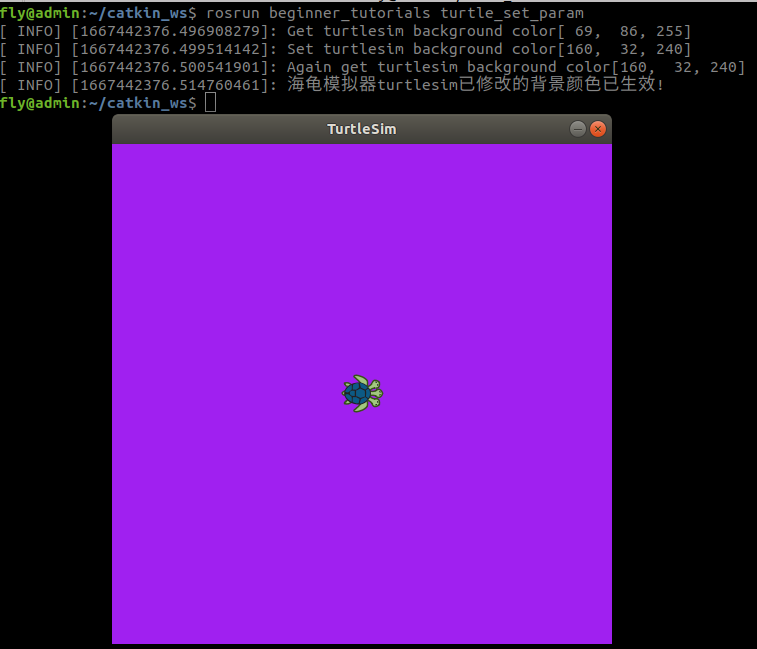
4.2.3 ���롢����
??����Ĺ����ռ���ִ��catkin_make����,��turtle_set_param.cpp����ɿ�ִ���ļ�turtle_set_param�������,���ն���ִ�й���������ʾ��
4.3 ���ʵ��(Python)
??��beginner_tutorials��������scriptsĿ¼�´����ĺ���ģ�����ı�����ɫԴ�ļ�:
roscd beginner_tutorials
cd scripts
touch turtle_set_param.py
chmod +x turtle_set_param.py
4.3.1 �������(turtle_set_param.py)
#!/usr/bin/env python
# encoding: utf-8
import rospy
from std_srvs.srv import Empty
def turtle_set_param():
# ��ʼ��ROS�ڵ�
rospy.init_node("turtle_set_param")
# ��ȡ����ģ����������ɫ����
red = rospy.get_param("/turtlesim/background_r")
green = rospy.get_param("/turtlesim/background_g")
blue = rospy.get_param("/turtlesim/background_b")
rospy.loginfo("Get turtlesim background color[%3d, %3d, %3d]",red ,green,blue)
# ���ú���ģ����������ɫ����,����Ϊ��ɫ(160,32,240)
rospy.set_param("/turtlesim/background_r",160)
rospy.set_param("/turtlesim/background_g",32)
rospy.set_param("/turtlesim/background_b",240)
rospy.loginfo("Set turtlesim background color[%3d, %3d, %3d]",160 ,32,240)
# ��ȡ����ģ����������ɫ����
red = rospy.get_param("/turtlesim/background_r")
green = rospy.get_param("/turtlesim/background_g")
blue = rospy.get_param("/turtlesim/background_b")
rospy.loginfo("Again Get turtlesim background color[%3d, %3d, %3d]",red ,green,blue)
# ���� /clear ����,ʹ�ѱ��ĵIJ�����Ч
rospy.wait_for_service("/clear")
try:
clear_client = rospy.ServiceProxy("/clear",Empty)
clear_client()
rospy.loginfo("����ģ����turtlesim���ĵı�����ɫ����Ч!")
except rospy.ServiceException as e:
rospy.loginfo("���÷���ʧ��!")
if __name__ == '__main__':
turtle_set_param()
4.3.2 ����CMakeLists.txt
??ֻ��catkin_install_python������scripts/turtle_set_param.py����:
#��װpython��ִ�нű�
catkin_install_python(PROGRAMS
scripts/turtle_set_param.py
...
DESTINATION ${CATKIN_PACKAGE_BIN_DESTINATION}
)
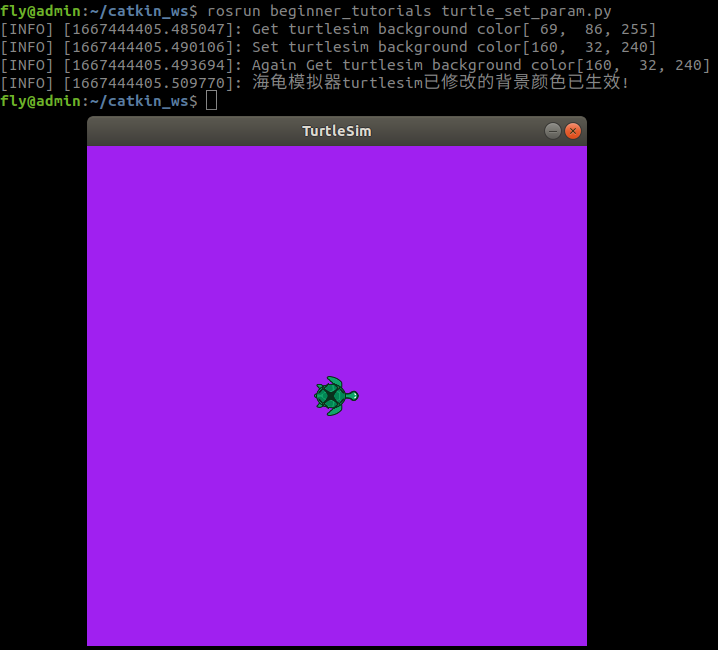
4.3.3 ���롢����
??��ʵ������Ӻܼ�,����Ҫ����,ֱ��ִ��python�ļ����С��������ǻ�������ϰ�߰�,ÿ�δ������Ĵ����,��catkin_make����һ��,��ʹ��Python�ڵ�Ҳ����ʹ����������Ϊ��ȷ����Ϊ��������Ϣ�ͷ����Զ�����Python���롣
5��rosparamʵ��
ROS�ṩ��һ���ȶ��������й���rosparam�����úͻ�ȡ������ͨ�������еĺ���ģ����(turtlesim)��ʵ�ٲ������
5.1 rosparam list
?? rosparam list �г����еIJ�������
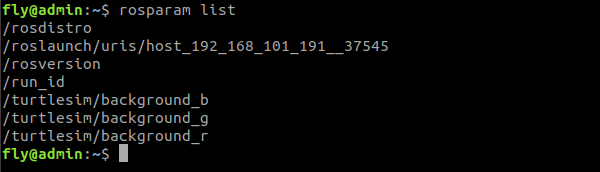
turtlesim�ڵ��ڲ�������������3�����������趨������ɫ(RGB��ʽ):
/turtlesim/background_x
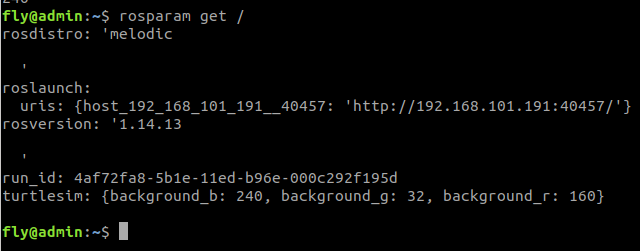
5.2 rosparam get
?? rosparam get [parameter-name] ��ȡһ��������ֵ��

?? Ҳ����ʹ�� rosparam get / ��������ʾ�����������ϵ��������ݡ�
5.3 rosparam set
?? rosparam set [parameter-name] [parameter-value] Ϊ��������һ��ֵ��
# �� turtlesim �ı�����ɫ��Ϊ��ɫ(RGB: 255 0 0)
rosparam set /turtlesim/background_r 255
rosparam set /turtlesim/background_g 0
rosparam set /turtlesim/background_b 0
?? ����ָ�����˲�����ֵ,����δ��Ч,���������Ҫ����clear����ʹ�ò�����������Ч:
rosservice call /clear

5.4 rosparam dump
?? rosparam dump[file-name] �������������� YAML ��ʽ������ת�����ļ��С�
# �� beginner_tutorials�������´���paramĿ¼�ļ���
roscd beginner_tutorials
mkdir param
# ��paramĿ¼�ļ����½������������� YAML ��ʽ������ת�����ļ��С�
cd param
rosparam dump params_all.yaml

Node:��������λ��Ϊ��ǰִ�������Ŀ¼�¡�
?? rosparam dump[file-name] [namespace] ֻת��ָ�������ռ��еIJ�����
# ��paramĿ¼�ļ�����ת��ָ�������ռ��еIJ���
rosparam dump params_specified.yaml turtlesim

5.5 rosparam load
?? rosparam load [file-name] �� YAML �ļ��еIJ������ص�ָ���������ռ�(Ĭ��Ϊ/)��
��params_all.yaml�ļ� turtlesim �ı�����ɫ��Ϊ��ɫ(RGB: 0 255 0)
rosparam load params_all.yaml
rosservice call /clear

??�������Խ�YAML�ļ��������µ������ռ�,����:copy_param
rosparam load params_specified.yaml copy_param

5.6 rosparam delete
?? rosparam delete [parameter-name] ɾ������ֵ��
rosparam delete /copy_param/background_r
rosparam delete /copy_param/background_g

ROS.org. ROS�̳�[EB/OL]. 2020-12-22[2022-7-5]. http://wiki.ros.org/cn/ROS/Tutorials. ??
ROS.org. ����ROS����Ͳ���[EB/OL]. 2020-12-23[2022-11-02]. https://wiki.ros.org/cn/ROS/Tutorials/UnderstandingServicesParams. ??
ROS.org. Parameter Server[EB/OL]. 2018-11-08[2022-11-02]. https://wiki.ros.org/Parameter%20Server. ??
ROS.org. rosparam[EB/OL].2014-06-29[2022-11-02]. https://wiki.ros.org/rosparam ??